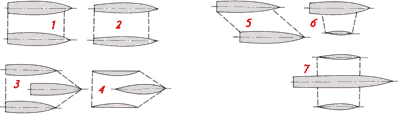
Fig. 1. Multi-hull ship types with traditional hull shapes: 1, 2) catamarans, symmetrical and asymmetric hulls; 3, 4) trimarans, symmetrical and asymmetric hulls; 5) catamaran with staggered hulls; 6) proa; 7) ship with (two) outriggers
Navigation and Marine Sciences - 2009
RC: 629.5-11; 629.5.01/.08The widespread development of multi-hull ships began in the second half of the twentieth century, and today many hundreds of such ships of various designs are built. This intensive development can be explained by the characteristics of various multi-hull ships. Any multi-hull ship type differs both from mono-hulls and from other multi-hull types because of their individual characteristics.
The main characteristics of multi-hull ships are examined briefly here. Their larger deck area relative to mono-hull ships means that they are more economical for most types of ‘volume’ cargoes, including passengers, cars and other wheeled vehicles, light containers, laboratories, weapons, including aircraft and helicopters, and so on. Similarly, in comparison with their mono-hull counterparts, multi-hulls are safer because of their larger and more simply achieved transverse stability and bigger above-water volumes. The larger permissible aspect ratio of these hulls also makes them more energy efficient at higher speeds. All multi-hull ships are, in general, more seaworthy than their mono-hull counterparts, and ships with small water-plane area (SWA ships) have the best performance characteristics with regard to seakeeping. The strength specificity of multi-hulls plays the leading role in determining transverse loads and the need of wet bottom slamming avoiding. The main disadvantages of multi-hulls are: bigger overall beam, increased wetted area, increased hull structure mass relative to full displacement, high enough possibility of wet deck slamming, these hulls are not convenient for sailing in ice.
Despite their applied significant advantages, the author believes that the main characteristics of multi-hull ships can be further improved. A general picture of his proposals is given here:
– (new level) Super-fast, triple-hulled vessels with sufficient airborne unloading capacity – for the doubling of achievable speeds in smooth water and relatively small wave conditions;
– (new level) New shape for fast ships with SWA – for higher speeds in waves;
– (new level) Special options for container-carriers (for transatlantic routes or for island service by gas-carrying containers) – for small-draft harbours with no reduction in seaworthiness;
– (new level) Twin-hull escort tugs – for 10 times greater transverse stability, i. e., sufficiently less likelihood of over-heeling by the tow rope;
– (new service) Outrigger SWA carrier for unmanned aircraft – for minimal displacement and sufficient seaworthiness;
– (new service) Outrigger SWA passenger liners with one to two helicopters – to avoid entry into harbours;
– (new safety feature) Inexpensive modernisation of existing small- and medium-sized passenger ferries through the addition of outriggers without docking the ship.
A multi-hull ship may consist of various numbers of hulls of various common or uncommon shapes and/or hulls with a small water-plane area (SWA ships). Different types of multi-hull ships differ from one another and from mono-hull ships based on their specifications.
First, it must be noted that variously shaped hulls, including SWA hulls, which have zero or negative transverse metacentric height, can be applied as parts of multi-hull ships. These hulls can also be asymmetric relative to their own longitudinal axes.
Figs. 1 and 2 give an indication of the variability of multi-hull ship types([Dubrovsky, 2001; Dubrovsky and Lyakhovitsky, 2001; Dubrovsky, Matveev, and Sutulo, 2007); see the same references for extensive bibliographies of related materials].
A twin-hull ship with identical conventional hulls is usually called a ‘catamaran’. Although it should be noted that the term is sometimes used to describe a twin-hull ship with any hull shape, the definition provided here is a more helpful one. Catamarans differ from the other types of multi-hull ships in that they have the greatest degree of transverse metacentric height. Their transverse metacentric height is equal to or even greater than their longitudinal one. Furthermore, in contrast with mono-hull craft, this superior stability does not mean a large roll acceleration in side waves.
The term ‘trimaran’ has been used in the Russian-language technical literature since the 1970s to refer to a triple-hull ship with equal conventional hulls. In the English-language literature (primarily from the US and UK since 1990), however, the term refers to a ship with a larger main hull and two smaller side halls, all of which have a conventional shape. This difference in terminology needs to be noted to avoid confusion. Finally, a ‘staggered catamaran’ is a very strange ship that has certain characteristics in common with both catamarans and trimarans, and the proa is a twin-hull ship with one large hull and one smaller hull (outrigger) of a conventional shape.
An SWA hull usually consists of a main watertight underwater component (gondola) and one or more thin struts that intersect the water surface and connect the gondola with an above-water platform.
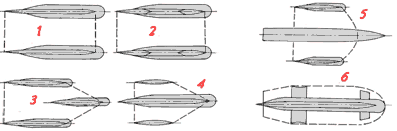
A trisec has the minimal relative area of water-plane and highest seaworthiness, but the ship type is most inconvenient from practical point of view (isvery sensitive to load changing, including fuel outlay). Since today, the dupluses are most used types of SWA ships, but thr other types are researched too.
The options shown here are of greater or lesser scientific or practical interest, and the author draws on his 50 years of experience in the following text.
Analysis of available data makes it possible to define the most common ranges for multi-hull ships in general:
· overall breadth/length ratio, Bm/L=0.3-1.0 (vs. 0.1-0.2 for mono-hulls);
· hull depth/overall length, H/L=0.1-0,25 (vs. 0.07-0.2 for mono-hulls);
· depth/length ratio, D/L=0.10-0.30 (vs. 0.07-0.10 for mono-hulls);
· one hull breadth/draft ratio, B1/d=0.5-2.5 (vs. 2-4 for sea-going mono-hulls).
· one hull length/breadth ratio, L/B1=3–30 (vs. 3-10 for sea-going mono-hulls).
The bigger hull depth of the multi-hulls is a result of needed wet deck (above-water platform bottom) distance from water level for slamming avoiding in waves. Ususlly the main volumed cargoes, as cars, passengers, etc., are arranged in the above-water platform. It means a sufficient advantage of multi-hull car ferries from safety point of view. Let us examine three comparable ferries of the approximately the same overall length (for example, 100 m). The monohull ferry can not have the car deck at a bigger distance from the design water-line, than 1-2 m, because the big enough hull volumes above can not be applied for any cargoes or passengers. But the distance of car deck of multi-hulls is at 5 – 7 m bigger. Moreover, the motions of the SWA ferry are smaller sufficiently, than the same motions of the monohull and the twin-hull ship with the conventional hull. The approximate possibility of car deck flooding by waves through car doors is compared at the Table 1.
Table 1.
Flooding possibility of car deck of various ships (as an example).
| Ship type | Distance from car deck to design water-plane | Possibility of car deck flooding by waves |
| A monohull | SG (1–2 m) | P1 |
| A catamaran | SG+5m | 0.01P1 |
| A duplus | SG+7 m | 0.0001P1 |
It seems evident, the SWA car ferry is much more safer, than the comparable monohull, from car deck flooding by waves point of view.
The relative deck area of multi-hull ships is larger than that of the same displaced mono-hull craft, as follows.
– 2.4-4 times larger for a catamaran
– 1.9-2.3 times larger for a twin-hull SWA ship (duplus or trisec)
– 1.6-2.3 times larger for an outrigger ship with a traditional main hull
– 1.3-2.3 times larger for an outrigger ship with an SWA main hull
The big advantages of the catamaran with regard to deck area are evident, but other types of multi-hull ships have the advantage too.
For example, Fig. 3 presents an aircraft-carrier with two ‘fly-off fly-on’ complexes, the advantages of which are evident from the tactical point of view.
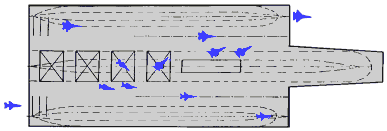
It seems evident that no permissible mono-hull could ensure such aircraft deck width and seaworthiness.
The initial transverse stability of multi-hulls is strongly dependent on the ship type.
A large enough transverse metacentric height thus allows on-deck safety applications of a payload on some catamarans. In general, these two characteristics – large deck area and big initial transverse metacentric height – are the main, but not the only, reasons for the widespread application of catamarans.
The initial transverse meatcentric height of a trisec or outrigger ship, in contrast, is approximately the same as, or only slightly greater than, that of a comparable mono-hull craft. The longitudinal metacentric height of a trisec is small enough (about as small as the transverse one of a mono-hull).
As we will see, the decreased initial metacentric heights of SWA ships, both transverse and longitudinal, is one of the main reasons for their superior seakeeping qualities.
Transverse metacentric radii depend on the square of transverse clearance (the distance between side hull centre planes); SWA ships usually have to have a minimal water-plane area and relative increased transverse clearance.
It should also be noted that the required outrigger dimensions of all ships with outriggers depend on the following assumption (for the same demands on transverse stability): the required moment of inertia of the water-plane area is ensured by either one or two outriggers. The existence of only one supposes damage caused by flooding. The latter case – two outriggers – corresponds to smaller dimensions for these outriggers, i.e., a smaller weight and towing resistance, whereas the former corresponds to larger outrigger dimensions, a larger transverse distance between outriggers or both.
In general, for multi-hulls, there is no dispute about the relationship between initial transverse stability and performance: it is very important, especially at high speeds. Multi-hulls can be designed to exhibit almost any required level of initial transverse metacentric height, including one equal to the longitudinal height value. Such a ship would contain hulls of a large enough aspect ratio to ensure a lower degree of towing resistance, especially at high speeds.
In correctly designed multi-hulls, a relatively larger size for the above-water water-tight platform, whose volume and dimensions are not as strongly restricted by transverse metacentric height (but, rather by weight), makes it simpler to ensure sufficiently higher damage metacentric height and non-sinkability relative to mono-hulls. Of course, this platform must be divided by water-tight bulkheads for a full realisation of its safety capabilities.
The hydrostatic characteristics of multi-hulls (including stability and nonsinkability) can be predicted using the usual calculation methods.
The majority of multi-hull ships with conventionally shaped hulls need no special stability restrictions, and the overall beam is selected based on other initial demands (for example, for a tug catamaran, the needed heel restriction on the maximal side force of the towing rope). The initial transverse metacentric height of an outrigger or SWA ship must be limited. For example, the US Navy standard can be applied on early stages of designing: the heel should be no more than 10 degrees from the side in wind speeds of 50 knots (in a restricted sailing area) or 100 knots (in an unrestricted sailing area) when the ship is at rest.
Multi-hull towing resistance characteristics can be defined by the counteraction of two tendencies: the larger relative wetted area per tonne of displacement and smaller wave resistance (the main part of residual resistance) by the greater aspect ratio (length to beam ratio) of single hulls and the possible favourable interaction of the wave systems generated by those hulls. (The disadvantage of a relatively larger wetted area declines with an increase in the comparison mono-hull’s beam-to-draft ratio.) However, any straight comparison of wetted area and residual resistance is pointless, because a larger wetted area means a smaller residual resistance coefficient, even for the same absolute wave resistance in the model and vice versa in the contemporary method of towing resistance scaling. Only full-scale ship towing resistance can be compared.
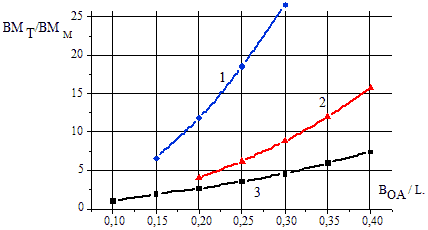
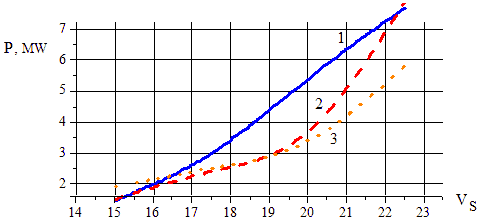
The main source of high-quality performance in catamarans is their large aspect ratio relative to single hulls. Statistical data comparing catamarans and mono-hulls are provided in Fig. 5(Anosov, 2005).
In addition, the big enough interaction of the wave systems generated by the hulls – of lateral wave systems in the main – is possible in any type of multi-hull design. This interaction is strongest in triple-hull shipswith equal hulls (see Fig. 6 (Dubrovsky, 2008b)). Two staggered hulls of any shape (and identical or varied dimensions) also result in sufficiently likely favourable interaction (Froude numbers for a hull length of from 0.4 to 0.7).
The evident advantage of trimarans results from the favourable interaction of the wave systems at the defined Froude numbers.
As with the corresponding mono-hulls, propulsors can be applied for multi-hulls of any type with the same loading values. A transition from a mono-hull to a comparable catamaran means more or less growth of the propulsor hydraulic area, i.e., propulsion coefficient growth. In addition, in multi-hull ships, usually a propulsor is placed at each hull centre-plane. The viscous wake is then used by the propulsor to a greater degree, and the effective wake is larger, than is the case in mono-hulls. SWA ships usually have a larger design draft, which means larger diameter propulsors and a correspondingly higher propulsive efficiency.
Seaworthiness in multi-hull ships depends on the number, shape and mutual placements of the hulls. First, relative to mono-hull ships, all multi-hull ships have various correlations between the forces of inertia and floating. This difference defines the value difference between the natural periods of motion, which is important for seakeeping.
For example, the greater initial transverse stability of a catamaran is stronger than the difference between its mass inertia moments in comparison with a mono-hull of the same displacement. As a result, the natural period of the catamaran’s roll is usually about two times smaller than that of the mono-hull, which means that the former’s roll resonance is in shorter waves of smaller length and inner energy. In the case of longer waves, the catamaran’s roll is sufficiently far from the resonance conditions, relative to the mono-hull’s roll in the same waves.
A practical example of the specificity is the successful sailing of the Soviet-built fishing catamarans, ‘Experiment’ and ‘Experiment-2’, which have displacements of about 1000 t, in sea state 6. It is well known that even much larger mono-hulls would be unable to sail in these wave conditions.
To decrease catamaran roll acceleration to the same level as that of a mono-hull, the catamaran’s dimensions must be selected correctly, as a badly designed catamaran will have greater roll acceleration than a mono-hull, even with smaller roll amplitudes. The longitudinal motion (pitch and heave) of a catamaran is approximately the same as that of a comparable mono-hull, whereas that of a trimaran is slightly less than that of a comparable catamaran.
The seakeeping advantages of SWA ships are a direct and indirect result of the small area of the water-plane. The natural roll periods of these ships are double those of mono-hulls, because of the approximately same degree of transverse initial stability and relatively larger overall beam (and a mass inertia moment relative to the longitudinal axis). However, their smaller degree of longitudinal stability and similar mass moment inertia values relative to the transverse axis are the reasons for their larger (by a factor of 1.5 or 2) natural pitch periods.
The disturbance forces and their moments are sufficiently small because of the small area of the water-plane. As a result, large-sized, low-speed SWA ships and semi-submersibles can never sail in resonance motion. Medium- and small-sized SWA ships can, but not in head waves. An increase in wave speed results in better seakeeping characteristics in SWA ships. The very small additional resistance provided by the waves is also the result of the small water-plane area.
The resonance motion of an SWA ship has larger amplitudes than that of a mono-hull, but at a narrower range of frequencies. However, this disadvantage can be compensated for by the greater effectiveness of various types of motion stabilisation devices, as the forces and moments they generate have the same order as the disturbance forces and moments on a small water-plane area. Air water tank activation is recommended as a motion stabiliser for slow-speed SWA ships and for motion mitigation at rest.
In general, a correctly designed SWA ship has the same seakeeping level as a mono-hull ship at five to 15 times larger displacement.
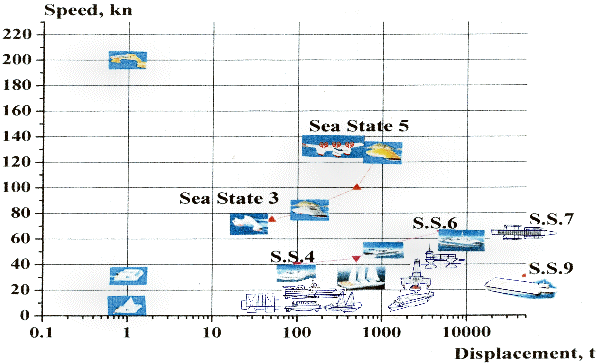
A seakeeping comparison of various ship types carried out using a special method devised by (Dubrovsky and Lyakhovitsky, 2001) demonstrates the advantages of small- and medium-sized SWA ships, which have an average per-year achievable speed (and average operational index) that is about 1.5-2 times greater than that in previously defined standards of seakeeping. The displacement of ‘all-weather’ SWA ships can be about 5,000-6,000 t; see Fig. 7. Here, the average operational index refers to part of a year, when all previously defined demands for seakeeping are fulfilled.
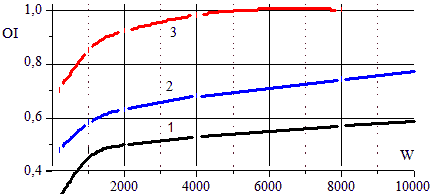
This means that their speed and any necessary heading relative to the wave direction will be ensured up to Sea State 6. The likelihood of more severe waves is usually less than 1%.
At present, multi-hull seaworthiness cannot be predicted with a very high degree of exactness. More seakeeping model tests are needed at an early stage of the design process. Seakeeping characteristics can be predicted using calculations, but we still lack a full understanding of the application limits and exactness of the proposed theoretical formulas.
Vertical clearance (the distance between design draft ant wet deck) is specific to multi-hull ships. It is possible to calculate it based on the motions and vertical displacement of the platform bottom, but today there are model tests and full-scale experiments on which to base this calculation (Dubrovsky and Lyakhovitsky, 2001).
The shown before motion specificity of various types of multi-hull designs refers to the sailing tactic adopted in waves. Thus, all headings need to be taken into account for a full comparison of various levels of seakeeping and all ranges of achievable speeds in the method of seaworthiness comparison (Dubrovsky and Lyakhovitsky, 2001).
The reasons for the higher level of course stability and lower level of controllability in the majority of multi-hull ships, particularly at high speeds, are their larger hull aspect ratios and the greater or lesser distance between the hulls. Triple-hull ships and ships with stern outriggers are the most stable on course, but their controllability relative to mono-hulls needs more attention from ship designers.
The manoeuvrability of SWA ships is strongly related to their attitude (dynamic trim and average draft changing). Some slow-speed SWA ships were built without direction rudders to allow them to change course by altering their attitude using horizontally controlled foils. As with mono-hulls, additional devices are usually necessary to ensure controllability.
In multi-hull ships, transverse strength (at low and medium speeds) is more important than, or equally important to, longitudinal strength (particularly for high-speed ships with a traditional hull shape). Longitudinal strength is more important for triple-hull ships, however.
Today it seems known that transverse load capacity depends on horizontal velocity in waves. Some transverse clearance changing results in smaller growth in the transverse bending moments, than some changing of ship draft. The transverse loads are linearly proportional to side hull displacement; which means that if outrigger ships have minimal transverse loads, then their transverse structure mass will also be minimal.
The longitudinal bending moments of SWA ships in head waves are proportional to the water-plane beam, i.e., the moments are smaller than the same ones of comparable mono-hulls. These bending moments also decline with greater speed. Considering their large hull depth, this means that longitudinal strength is a matter of secondary importance in SWA ships.
The transverse strength of all types of multi-hull ships is ensured by their transverse bulkheads with effective flanges as part of the board and deck plating. These bulkheads must be placed on the same vertical flat surfaces as the above-water platform, struts (if there are any) and under-water volumes (gondolas).
Ensuring the longitudinal strength of trimarans and tricores requires longitudinal bulkheads supported by transverse bulkheads in the above-water platform.
The general problem of all multi-hull ship strength is the slamming of wet decks (lower bottoms of above-water platforms). The main measurements of the problem minimization are decreasing of slamming possibility (by decreasing of motion and by vertical clearance growth), and decreasing of slamming local pressure (by special structures).
Approximate analysis of full-scale data shows that the metal hull weight of multi-hulls is smaller, by around 10-15%, than that of mono-hulls in relation to overall dimensions.
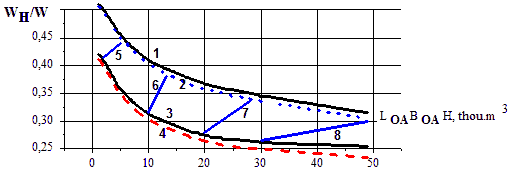
The metal structure of outrigger ships with SWA main hulls has a minimal relative weight. The transverse load capacity is small because the outrigger displacement is relatively small, whereas the longitudinal load capacity is small because of the small water-plane area of the main hull.
Systematic calculations show the possibility of approximate predictions of SWA hull weight using a database of the minimal platings of traditional mono-hulls.
It is clear that different multi-hull designs offer different technical advantages, thus paving the way for new types of multi-hull ships to be developed.
A general overview of design options for multi-hull ships, as proposed by the author, is presented in Fig. 9.
Examples of new multi-hull designs for the transport of volume cargoes at all ranges of displacement and speed – from self-stabilised racing boats capable of speeds of up to 150 or 200 knots to 65,000-t aircraft carriers with double the current fly-off fly-on capacity and the ability to sail in conditions up to Sea State 9 for larger ships – are presented in more detail in this section.
Doubled speeds (in comparison with contemporary levels), increased seaworthiness and minimal wash can all be ensured by the design of planing ‘wave-piercing’ trimarans (WPT) with sufficient air-borne unloading capacity (Dubrovsky, 2004). Fig. 10 depicts a proposed design for a 130-knot long-line ship for 200 passengers (Dubrovsky, 2009) that would allow a one-day trip between London and New York.

The proposed WPT ships shown in Fig. 9 is restricted at top speeds only by the power capacity of existing gas turbines. No mono-hulls can achieve such speeds at the required level of seakeeping.
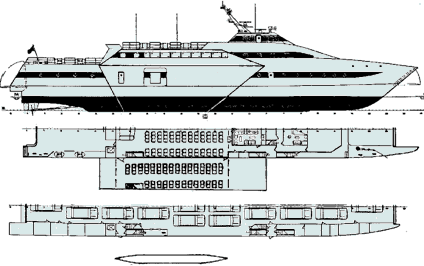
Partially unloading by under-water foils allows the development of small-sized fast ferries. For example, the proposed mono-hull SWA vessel with foils shown in Fig. 11 has a passenger capacity of 150 persons and additional payload capacity of about 10 t.
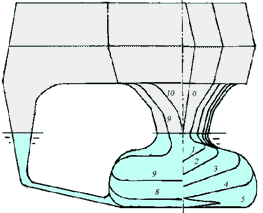 Fig. 11. Hull shape for a ‘semi-planing’ SWA mono-hull vessel with partial unloading by foils |
This ferry design features displacement of about 150-200 t, a design speed of 50 knots, a range of 500 nm at design speed, power of 10-12 MWt and design seakeeping up to Sea State 5.
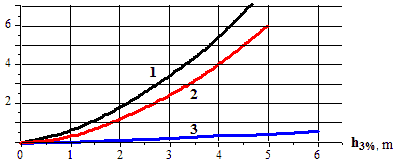
The model-based data on pitch amplitudes and accelerations in head waves are shown in Figs. 12 and 13.
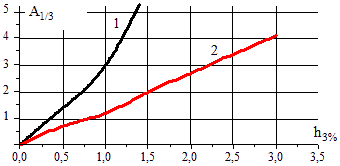
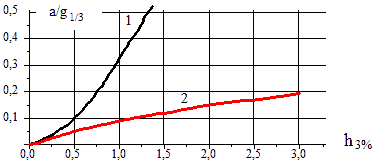
It is evident from Figs. 12 and 13 that the foiled SWA vessel is better from the seakeeping point of view than a 1000-t fast mono-hull vessel.
A higher level of seakeeping and greater speeds in waves are ensured by the novel shape of an SWA gondola ship proposed by Dubrovsky (2000), which is particularly suitable for
fast battleships such as that shown in Fig. 14.

The same hull shape can also be applied to foiled SWA corvettes, as can be seen in Table 1. (Dubrovsky and Sahoo, 2006). X-Craft in this table refers to a built twin-hulled USNS with a decreased bow water-plane area.
Table 2
Main dimensions and general characteristics of fast corvette options.
| Ship type | X-Craft | S/P SWATH | Foil-outrigger SWA |
| Design displacement (t) | 1400 | 1500 | 1200 |
| Overall length (m) | 79,9 | 60 | 70 |
| Overall beam (m) | 22 | 28 | 25 |
| Payload (t) |
About 250 |
||
| Deadweight (t) |
About 500 |
||
| Design speed (knots) | 50 | 60 | 70 |
| Total power (MW) | 72 | 90–100 | 110–120 |
| Sea State for full operability | 4 | 5 | 6 |
| Range at 20 knots, nm | 4000 | 3500 | 3000 |
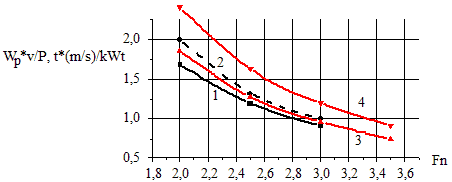
Fig. 15 shows the speeds that the fast corvettes listed in Table 1 can achieve in head waves.
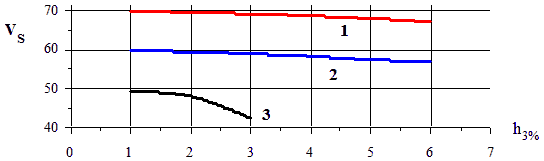
It is clear that the alternative options offer the greatest possible speeds because of the smaller degree of speed loss in waves. No mono-hull design can achieve comparable speeds in waves.
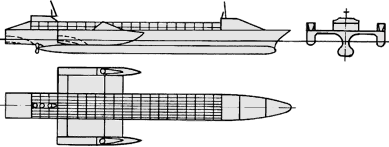
The outrigger SWA ship platform shown in Fig. 16, which is designed as a liquid gas container-carrier, offers a small design draft and a high degree of seaworthiness. The ship purpose was proposed by Mr. P. Pefanis.
The deadweight of this ship is about 3,000 t; it has a speed of 18 knots and a design draft of 3.5 m at harbour and 5.5 m at sea; and it is designed for up to and including Sea State 7.
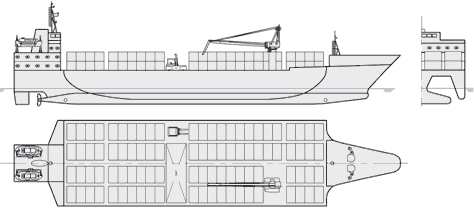
Fig. 17 presents a comparison of motion estimations and permissible rolls levels. Without motion stabilisers, the vessel has a permissible roll level of wave heights up to 5 m and a permissible pitch of head wave heights up to 3.3 m. A wave height of up to 4 m is permissible from the acceleration point of view in the ship’s mass centre, which means Sea State 5 or slightly above. In Sea State 6, the speed and heading of a ship without stabilisers is restricted. The well-established desirable effects of motion stabilisers, however, hold out the promise of decreased motion in the next design stage.
An all-weather 40-knot transatlantic container-carrier is depicted in Fig. 18 (payload: 6,000 t).
No mono-hull vessel can match this container-carrier with regard to such a small loss of speed in waves.
Carriers for unmanned aircraft (UMA) have potential applications for surface monitoring in geology, oceanography, sailing, fishing and defence applications, amongst others. The proposed carrier shown in Fig. 19 is intended to accommodate 10 to 12 UMA with a wing span of 6 m, four to six UMA with a wing span of 15 m and a number of unmanned submersibles.

A small modification of this ship (namely, the addition of two forked hangars and a fuel-supply system) would allow to carry two to five strike helicopters, rather than the larger UMA, which could provide very effective defence capabilities against pirates.
Again, there is no mono-hull vessel available that offers a comparably large deck area in combination with a high degree of seaworthiness and sufficiently small displacement.
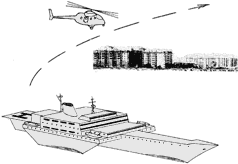 Fig.20. Passenger ship for coasts without harbours (Dubrovsky, Matveev, 2005) |
The proposed all-weather SWA passenger ship shown in Fig. 20, which accommodates one to two helicopters, would allow passenger traffic to and from the coast via helicopter, without the need for a harbour.
Such a helicopter service would be possible in conditions up to and including Sea State 6, with full displacement of about 5,000 t, which no existing mono-hull craft can match.
Small-sized passenger mono-hulls can be inexpensively modernised by the addition of outriggers to the existing hull with no need for docking. Fig. 21 shows an option for modernising a Chinese-built ship to increasing its capacity and stability, thus ensuring a higher degree of safety.
Every year, we read of accidents involving small-sized mono-hull passenger ships, with the loss of many lives. Modernising these vessels by adding outriggers could save many lives without great expense, because the modification could be carried out without docking.
It seems self-evident that the wider application of various designs of multi-hull ships in non-icy seas would ensure improved technical standards and allow new types of marine services. No existing mono-hulls offer comparable levels of technical capabilities..