Морские исследования и технологии изучения природы Мирового океана
Выпуск 1, 2005
УДК 629.5.03
В.Н. Храмушин
Исследование путей создания гибкого плавникового движителя
с динамически изменяемой геометрией машущего крыла
В сообщении обосновываются теоретические и экспериментальные исследования новых унифицированных движителей, рулей и стабилизаторов качки, обладающих малой гидроакустической шумностью и способных обеспечить повышенную проходимость и маневренность для автономной мобильной гидрофизической аппаратуры и морской робототехники.
Researches for a creation of flexible fin propulsive device with dynamically changeable geometry of flapping wings.
V.N. Khramushin.
In the message are motivated theoretical and experimental studies for a new unified flapping propulsive wings, rudders and hull stabilizers, possessing slow hydroacoustical noisiness and capable to provide the high possibility and maneuverability for autonomous measurement vehicle and sea robotics.
Мобильная морская измерительная аппаратура и средства морской робототехники могут стать более эффективными в случае использования малошумных движителей, обладающих повышенной надежностью и проходимостью при плавании в прибойной зоне и в сильно загрязненных или заросших водорослями акваториях. Явными техническими решениями для построения таких движителей представляются естественные аналоги из живой природы – различные виды машущих и плавниковых движителей гидробионики.
История опытов по созданию машущего движителя к настоящему времени выявила массу технических и теоретических проблем, без комплексного решения которых такой движитель до настоящего времени не находит путей практической реализации на кораблях флота. При этом неразрешимость проблем имеет всеобщий характер:
отсутствие технологий изготовления больших профилированных поверхностей с заданными свойствами упругости, гибкости и прочности эластичных материалов, обладающих высокой устойчивостью к коррозии в морской воде;
отсутствие эффективных низкоскоростных линейных двигателей большой мощности; сложности создания упругих (не жестких) кривошипно-шатунных механизмов, обладающих достаточной прочностью и надежностью при работе в условиях переменных и ударных нагрузок;
отсутствие теоретических, эмпирических или численных моделей нестационарной гидромеханики, способных моделировать вихревые потоки вблизи машущего плавника и распределение гидродинамических сил на его поверхности, что крайне необходимо для обоснования проектных решений при создании комплекса «движитель–руль–стабилизатор качки», оптимизации режимов работы такого унифицированного движителя в различных условиях плавания корабля.
Для мобильной морской аппаратуры первые две технологические и технические проблемы не столь актуальны, так как самоходные приборные комплексы могут проходить регулярную профилактику в сухих помещениях на борту сопровождающего судна или в береговых лабораториях, а отсутствие жестких требований по длительности автономного плавания этих малых вполне допускает использование двигателей с невысокой энергетической эффективностью.
Это позволяет сконцентрировать основное внимание на решении третьей – теоретической - задачи, что и является главной целью настоящего исследования.
Современная цифровая техника позволяет сформировать исполнительные механизмы для управления сложными движениями плавниковых движителей, каждый из элементов которого может двигаться по строгим математическим законам, в том числе обеспечивая динамически изменяемую геометрию машущего крыла. Проведение натурных экспериментов со стендовыми и реальными вариантами плавниковых движителей в первую очередь необходимо для отработки прямых вычислительных экспериментов и обоснования новых математических моделей, предназначенных для автоматического регулирования параметров движения новых плавниковых движителей.
В качестве математической основы для изучения динамики машущего крыла разрабатываются прямые вычислительные эксперименты по моделированию нестационарных течений реальной (вязкой и сжимаемой) жидкости с использованием трехмерного тензорного аппарата вычислительной гидромеханики [3]. Ближайшим аналогом таких вычислительных экспериментов является метод крупных частиц [1], эффективно используемый при решении прикладных задач аэродинамики.
Однако отметим, что в Китае и других странах Дальнего Востока и Африки существует и активно используется реальный прототип рассматриваемого здесь плавникового движителя. Это – известное с античных времен [2] кормовое весло, единственно способное обеспечивать безопасное плавание, поддержание курса и скорости хода в условиях интенсивного волнения.
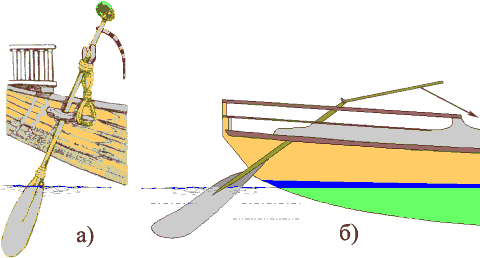
Рис. 1. Характерные тросовые закрепления и изгибы рукоятки кормового весла позволяют гребцу почти автоматически регулировать угол атаки плавникового движителя, что обеспечивает одинаковое усилие при плавном поперечном раскачивании весла вне зависимости от скорости хода судна. На левом рисунке (а) приведено вертикальное весло, использовавшееся в древнем Египте; на правом (б) – современное весло китайских гребных судов, работая которым, гребец одной рукой упирается в наклонное древко весла, второй – упирается и одновременно управляет углом атаки плоского пера при поперечных раскачиваниях кормового весла.
В технической реализации самоходных морских приборных комплексов машущие движители могут быть изготовлены в двух модификациях: 1) кормовое машущее крыло с активно деформируемой поверхностью, работающее по принципу рыбьего хвоста; 2) плавниковый движитель, подобный крылу ската.
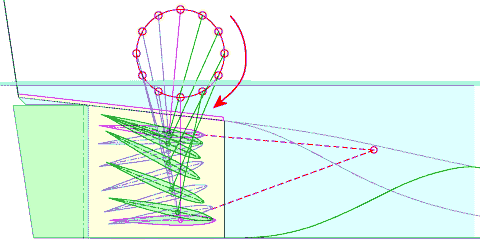
Рис. 2 Механизм работы простейшего жесткого пластинчатого машущего крыла
На рис. 2. показан пластинчатый (жесткий синусоидальный) движитель с жестким крылом, размещенным внутри замкнутого прямоугольного короба. Боковые стенки короба служат концевыми шайбами для машущего крыла, а его верхняя и нижняя плоскости служат уменьшению вертикальных пульсаций корпуса при работе движителя, одновременно создавая своеобразную «реактивную» составляющую тяги плоского крыла в его крайних положениях, где по условиям гидродинамической оптимизации поверхность крыла должна была бы очень сильно искривляться.
Шаг движителя (угол атаки крыла в его среднем положении) регулируется высотой кривошипного механизма и, соответственно, изменением длины шатуна, изменение которых в процессе работы движителя очень сложно реализовать на практике. Другим серьезным недостатком такого движителя является невозможность герметизации кривошипно-шатунного механизма, отчего он будет работать в полупогруженном состоянии, что также недопустимо для реального судового движителя ввиду быстрого коррозионного износа подвижных узлов механизма.
Однако для приборных комплексов, работающих на поверхности воды ограниченное время, такой движитель может быть очень эффективным. Формально он обладает всеми достоинствами, перечисленными в начале данного сообщения. Исследование такого движителя важно и по той причине, что его математическая модель наиболее проста и даже допускает расчеты по чисто двумерным (плоским) пространственным схемам. К примеру, вышеуказанные недостатки кривошипно-шатунных механизмов могут быть исключены при использовании простых линейных шаговых двигателей, работающих под управлением электронных следящих систем.
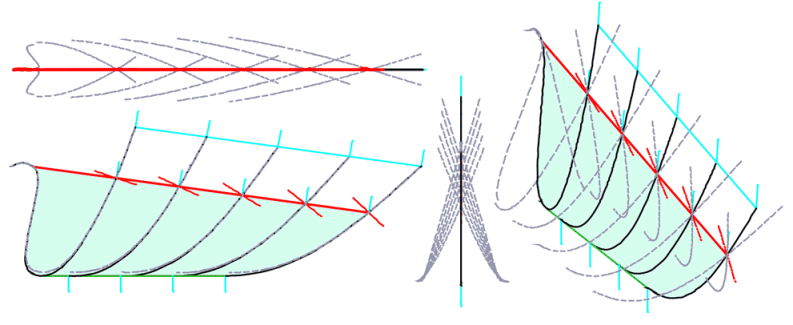
Рис. 3. Внешний вид гибкого плавникового движителя в распрямленном состоянии. Пунктиром показан характер искривления рабочей поверхности плавника при его простом наклоне.
Машущий плавниковый движитель (рис.3) представляется в виде последовательности гибких крыльевых пластин, раскачивающиеся движения которых управляются бортовым компьютером и происходят по строгим математическим законам, учитывающим необходимость динамического изменения формы крыла для минимизации индуктивных потерь на его крайней кромке.
Главной особенностью показанного на рис. 3 плавника является то, что в движении его передняя кромка (жесткое ребро) несколько опережает перемещение основной плоскости гибкого крыла, что препятствует перетоку жидкости через концевую кромку короткого крыла – плавника, способствуя тем самым стабилизации вихревого потока вблизи движителя. Важнейшим достоинством такого движителя является возможность задействования его в качестве руля и стабилизатора бортовой и килевой качки, что достигается простым отклонением и искривлением средней линии плавника в процессе его рабочих раскачиваний. Большая длина гибкого плавника позволит эффективно использовать его при прохождении мелководий, даже когда крайняя кромка плавника начнет зарываться в грунт змеевидными движениями. В случае сильного искривления жестких передних кромок каждого из элементов машущего плавника его гидродинамическое качество на заднем ходу будет несколько ухудшено.
Математическая модель такого движителя является чисто трехмерной и нестационарной, поэтому его исследования могут проводиться только с помощью прямых вычислительных экспериментов. В этом случае создаваемая в лаборатории вычислительной гидромеханики и океанографии натурная модель машущего плавника должна послужить важнейшим инструментом для обоснования результатов численного моделирования. В планах новых теоретических и экспериментальных исследований предусматривается построение упрощенных эмпирических зависимостей, пригодных для использования в исполнительных механизмах по управлению движителем при его реальной эксплуатации в составе морской робототехники.
К сожалению, гибкий раскачивающийся плавник не лишен ранее упомянутых технологических и технических недостатков в применении его для крупных морских судов. В то же время при его установке на самоходных морских приборных комплексах избыточная прочность механизмов и коррозионная устойчивость эластичных материалов вполне может быть обеспечена, что, в свою очередь, обусловит бесшумность свободного плавания морской робототехники, ее всепроходимость в прибойной зоне морских мелководий и в заросших водорослями акваториях.
Применение крыльевых систем для мобильных средств морской техники делает бесспорными технические преимущества нового движителя, обосновывая поиск оптимальных технологических решений для практической реализации различных модификаций машущих плавников и оптимизации режимов их работы; разработку предложений для использования их как унифицированных маршевых движителей – рулей, подруливающих устройств и стабилизаторов качки.
Литература
- Белоцерковский О.М., Давыдов Ю.М. Метод крупных частиц в газовой динамике. М. : Наука, 1982. 370 с.
- История штормовой мореходности от древности до наших дней / В.Н.Храмушин, С.В.Антоненко, А.А.Комарицын и др. Южно-Сахалинск : Сах. кн. изд-во, 2004. 288 с.
- Храмушин В.Н., Файн А.В. Тензорное представление алгоритмов вычислительной гидромеханики // Вестн. ДВО РАН. 2004. № 1(113). С. 52-68.
Василий Николаевич Храмушин СКБ САМИ ДВО РАН
Морские исследования и технологии изучения природы Мирового окена, Выпуск 1, 2005, с.179-183
Marine Researches and Technique of Ocean Studies. Issue № 1, 2005, p.179-183
V.N. Khramushin. Researches for a creation of flexible fin propulsive device with dynamically changeable geometry of flapping wings.