Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель состоит из двух управляемых крыльев или поворотных насадок на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов, отличающиеся тем, что:
- поворотные баллеры крыльев допускают упругий люфт не менее чем до углов ±30°, обеспечиваемый пружинным (или электромагнитным) устройством с восстанавливающим моментом пропорциональным отклонению крыла от нейтрального нулевого, или заданного аппаратурой управления угла;
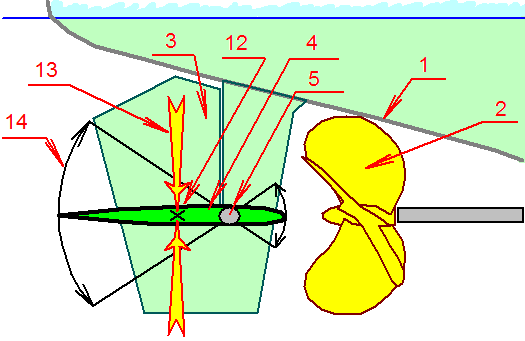
- оси баллеров проходит через гидродинамический центр бокового сопротивления крыльев, что минимизирует усилия на их перекладку на больших скоростях хода корабля;
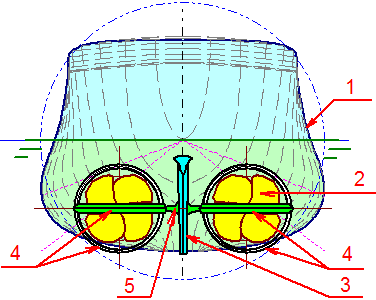
- при повороте крыльев враздрай, на ходу корабля создаются кренящие моменты для компенсации бортовой качки; при повороте крыльев вместе на всплытие/погружение – создаются дифферентующие моменты для компенсации килевой качки;
- при использовании двух наклонных крыльев, они одновременно будут выполнять функции рулевого устройства с неуправляемым компенсатором центробежного крена на циркуляции, и поддерживать улучшенные условия для безопасного маневрирования на крупном волнении;
- при использовании горизонтальных крыльев совместно с традиционным вертикальным судовым рулем, законы автоматического управления рулем и крыльями становятся независимыми, что позволяет комплексно решать задачи маневрирования и стабилизации корпуса корабля на больших скоростях хода и в условиях штормового волнения;
- в случае остановки гребных винтов на крылья начинают действовать вертикальные потоки жидкости, обусловленные вертикальными перемещения кормовой части корабля в штормовых условиях, при этом крыло упруго поворачивается и создает тяговое усилие для движения корабля вперед, величина которого в гидростатическом приближении многократно превосходит силовое усилие на рычаге между осью баллера и центром площади крыла.
Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель
Изобретение относится к области судостроения и науки.
Теоретической основой изобретения являются результаты фундаментальных исследований в области гидромеханики штормового плавания корабля. Наивысшая эффективность реализации изобретения может быть достигнута для формы корпуса корабля повышенной штормовой мореходности, с запасом надводной плавучести не превышающей водоизмещения, и без скуловых килей и других активных крыльевых стабилизаторов качки в средней части корпуса.
Предметом изобретения является устройство, состоящее из двух управляемых крыльев или поворотных насадок на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов. Механизм поворота баллера создает упругий люфт до ±30°, обеспечиваемый пружинным (или электромагнитным) устройством, которое создает восстанавливающий момент тем больший, чем больше крыло отклонено от заданного системой управления нейтрального положения крыла.
Баллеры стабилизирующих крыльев устанавливаются горизонтально или наклонно. Ось баллера проходит через гидродинамический центр бокового сопротивления крыла, находящемся в 1/3 длины хорды от передней кромки крыла, что минимизирует усилия на перекладку крыльев. Поворот плоскостей крыльев на ходу корабля приводит к образованию кренящих и дифферентующих моментов для компенсации килевой и бортовой качки корабля. При повороте крыльев враздрай будут создаваться кренящие моменты для компенсации бортовой качки, при повороте вместе на всплытие/погружение – создаются дифферентующие моменты для компенсации килевой качки.
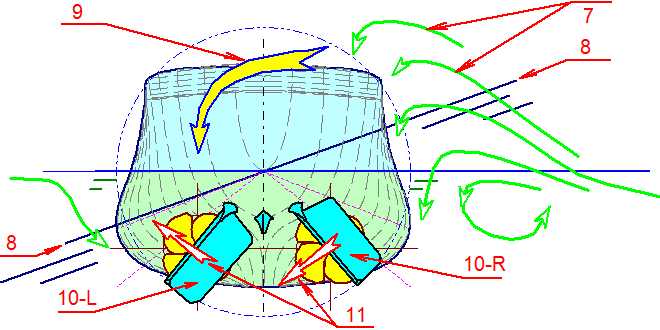
В случае остановки гребных винтов на крыло активного стабилизатора перестает действовать набегающий поток, а возникающая вследствие остановки судна интенсивная килевая качка создает вертикальные потоки жидкости с центром приложения гидродинамических сил центре площади крыла, смещенном относительно оси баллера в корму. Подпружиненное крыло получает возможность упругого поворота, отчего вертикальный поток жидкости преобразуется в горизонтальный, крыло соскальзывает, и появляется тяговое усилие для движения корабля вперед, величина которого в гидростатическом приближении в шесть раз превосходит силовое усилие на рычаге между осью баллера и центром площади крыла.
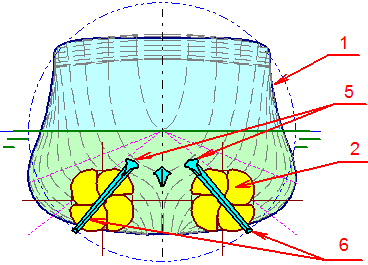
Крылья активного стабилизатора качки могут быть установлены горизонтально, рядом с традиционным судовым рулем, или наклонно, взяв, при этом, на себя функции руля управления. Наклонные крылья при перекладке на борт создадут кренящий момент на тот же борт, чем компенсируются центробежные силы, возникающие на циркуляции корабля. При работе в качестве успокоителей качки, наклонные крылья одновременно будут поворачивать судно в сторону волнового воздействия, что соответствует маневру на уменьшение опасности, и что особенно важно при движении на курсах по волне в условиях возможного брочинга.
Формально наклонные крылья без судового руля управления будут создавать недостаточное количество управляющих воздействий, и при их проектировании необходимо решение задачи минимизации кренящих сил, сопутствующих обычному повороту корабля. Однако такая схема активного стабилизирующего устройства – аварийного штормового движителя наиболее технологичная и проста в реализации, так как механизмы поворота крыльев будут устанавливаться внутри корпуса корабля, а не на вынесенном за борт рудерпосте пера руля.
В случае использования вертикального пера руля и двух горизонтальных стабилизирующих крыльев математические законы управления обретают свойства достаточности. В частности это означает, что на тихой воде стабилизаторы качки смогут легко скомпенсировать крен, возникающий при циркуляции корабля с малой начальной остойчивостью при его движении на больших скоростях хода, что также является важным мореходным качеством корабля при его эксплуатации.
Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель. Изобретение относится к области судостроения и науки.
Теоретическую основу изобретения образуют результаты фундаментальных исследований в области гидромеханики штормового плавания корабля, обобщенные в монографии: «Поисковые исследования штормовой мореходности корабля» [1] и в книге: «История штормовой мореходности» [2].
Ближайшим прототипом является универсальное по принципу действия и значительно более сложное в реализации крыльевое устройство (патент RU-2360831 – «Корабль с плавниковым движителем»[3]), где гибкое машущей крыло является главным движителем, успокоителем качки и рулевым устройством одновременно, и которое также способно создавать тягу по излагаемым здесь принципам пассивного штормового аквадвижителя.
Предметом настоящего изобретения является устройство, состоящее из двух управляемых крыльев или поворотных насадок на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов. Механизм поворота баллера создает упругий люфт до ±30°, обеспечиваемый пружинным (или электромагнитным) устройством, которое создает восстанавливающий момент тем больший, чем больше крыло отклонено от заданного системой управления нейтрального положения крыла.
Наивысшая эффективность реализации изобретения может быть достигнута для формы корпуса корабля повышенной штормовой мореходности, спроектированного с учетом технических решений, изложенных в патенте России RU-2360827 – «Корабль без бортовой качки на волнении» [4] и заявке на изобретение № 2007133625 – «Корабль без килевой качки на ходу на волнении» [5], с запасом надводной плавучести не превышающей водоизмещения, и не имеющего скуловых килей и других активных крыльевых стабилизаторов качки в средней части корпуса. Для кораблей с избыточным запасом плавучести, предлагаемое изобретение будет способствовать частичному гашению качки корпуса, так как противодействие силовым нагрузкам штормовых волн на большие надводные объемы корпуса становится технически невозможным, или недопустимым по условиям безопасности мореплавания.
В исследованиях штормовой мореходности корабля показана низкая эффективность активных крыльевых успокоителей качки в средней части корпуса корабля [5], и указываются факторы повышенной опасности опрокидывания судна под ударами гребней штормовых волн, если на корпусе имеются скуловые кили, что связано с большой величиной и непредсказуемостью поперечных составляющих скорости внешних течений в условиях интенсивного штормового волнения.
Поперечные составляющие течения вблизи корпуса корабля, идущего полным ходом вперед, отсутствуют только под кормовым подзором, непосредственно за работающими гребными винтами. Установка активных крыльевых успокоителей качки в потоке гребных винтов является главным условием для реализации законов управления крыльевыми устройствами, которые должны действовать на упреждение силового воздействия одиночных гребней штормовых волн [6], и что возможно только под непрерывным контролем точности задания и исполнения компенсационных кренящих и дифферентующих моментов. За гребными винтами действует набегающий поток, скорость которого значительно превосходит скорость хода судна, что также повышает эффективность работы активных успокоителей качки, а при специальном профилировании поверхностей крыльев, возможно небольшое увеличение КПД маршевых движителей за счет перенаправления и продольного ускорения закрученного за винтами потока жидкости.
В случае потери хода в штормовых условиях плавания, корабль немедленно подвергается интенсивной килевой качке, а кормовая часть корпуса получает значительные вертикальные колебания под воздействием штормовых волн [2,4,6], что обусловлено широкими кормовыми ватерлиниями и условно большим надводным объемом корпуса над кормовым подзором, устраиваемым для обеспечения безотрывного потока в зоне действия гребных винтов. Наличие интенсивных вертикально-поперечных потоков в кормовой оконечности корабля является достаточным условием для активизации крыльевых устройств в качестве машущих плавниковых движителей, действие которых начинает проявляться в наиболее опасных аварийных режимах штормового плавания корабля с остановленными машинами. Гидродинамическим достоинством настоящего изобретения является техническое решение, при котором механическое действие аварийного плавникового аквадвижителя будет проявляться без каких-либо дополнительных силовых управляющих воздействий на крыльевые устройства. Отчасти эти же крылья продолжат служить пассивными успокоителями качки, способствуя дополнительному демпфированию ударов под кормовой подзор корпуса, и отчасти предотвращая опасность гидродинамического захвата корпуса и опрокидывания корабля в случае быстрого падения под гребень последующей штормовой волны.
Предлагаемое изобретение поясняется чертежами, где:
В штатном режиме работы активный успокоитель качки (фиг.1, фиг.2), по командам от измерительно-аналитической системы для краткосрочного прогноза внешнего волнового воздействия на корпус корабля, перекладывает горизонтальные (наклонные) крылья враздрай для компенсации кренящих моментов, или совместно на всплытие/погружение для компенсации дифферента при килевой качке. Для совместной компенсации кренящих и дифферентующих моментов, в законах управления крыльями применяется правила сложения углов перекладки стабилизирующих крыльев.
Наклонные крылья (фиг.2) служат также рулями управления, которые при перекладке одновременно создают кренящий момент на тот же борт, чем компенсируются центробежные силы, возникающие на циркуляции корабля. При работе в качестве успокоителей качки, наклонные крылья одновременно поворачивают судно в сторону волнового воздействия, что соответствует маневру на уменьшение опасности, и что особенно важно при движении на курсах по волне в условиях возможного брочинга.
В случае остановки гребных винтов в условия штормового волнения, корабль немедленно подвергается интенсивной и ничем не сдерживаемой килевой качке, при которой огромный надводный объем в кормовой части корпуса приобретает наиболее сильные вертикальные раскачивания. В столь опасных условиях для плавания, подпружиненные кормовые крылья, способные поворачиваться на угол порядка ±30° под действием сил от вертикальных потоков жидкости, начинают отражать эти потоки в корму, что создает гидродинамическую тягу для начала движения судна вперед, и поддержания его управляемости в штормовых условиях аварийного плавания. При этом эффективность машущих крыльев тем выше, чем крупнее и опаснее штормовое волнение, и, соответственно, возникает наибольшая потребность в обеспечении штормового маневрирования для предотвращения гибели корабля.
Очень важно также отметить, что упругие (подпружиненные) перекладки крыльев при их работе в качестве успокоителей качки, будут одновременно способствовать меньшим потерям хода при резких воздействиях на винторулевой комплекс со стороны штормовых волн, а в случае оголения крыльев при отрыве кормового подзора от воды над волновой впадиной, в следующей фазе падения корпуса на быстро возвышающуюся волну, не произойдет ударного разрушения крыльев при их жесткой встрече с поверхностью воды.
Таким образом, достигается законченное техническое решение о реализации эффективного «Активного стабилизатора килевой и бортовой качки корабля – штормового аварийного аквадвижителя», полностью удовлетворяющего принципам непротиворечивого проектирования корабля в области согласования и устранения негативных эффектов от внедрения новых корабельных механизмов, не привносящих опасных для мореплавания качеств корабля.
Патентный поиск
SU 1565747 A1, 23.05.1990. SU 818962 A, 07.04.1981. RU 211884 C1, 27.05.1998.
Литература