Морские исследования и технологии изучения природы Мирового океана
Выпуск 1, 2005
УДК 629.5
В.Н. Храмушин, А.С. Корытко.
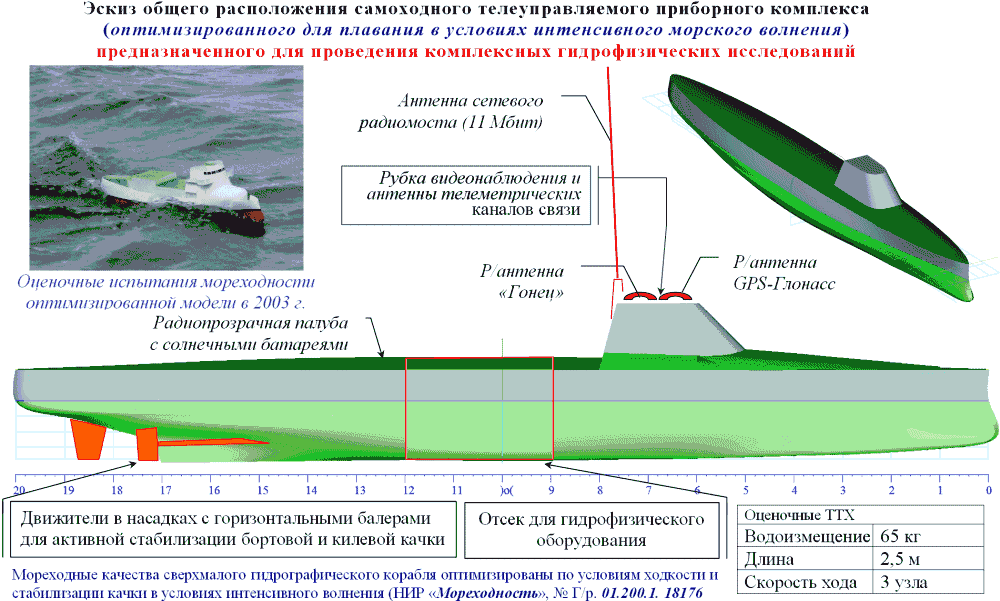
В сообщении обосновывается новое направление теоретических и экспериментальных исследований в области создания автономных морских самоходных приборных комплексов, способных в автоматическом режиме проходить большие расстояния и проводить разнообразные измерения и анализ состояния морских акваторий, обеспечивая регулярную доставку телеметрической информации в морские службы и информационно-аналитические центры. Новые проекты сверхмалых гидрографических кораблей могут быть использованы при проведении гидрографических работ в портовых акваториях, устьях рек и прибрежных мелководьях, в том числе в условиях плавания на интенсивно обрушающемся волнении, где присутствие человека может быть невозможным, нежелательным или опасным.
Shipbuilding researches for a small autonomous hydrophysical vessel.
V.N. Khramushin, A.S. Korytko
In article are vindicate a new principles and technical acceptance, which will use at construction displacement hull-prototype for the small autonomous vessel, intended for sea surface operative controls and hydrophysical data collecting.
Одним из эффективных методов контроля морских акваторий и проведения охранно-сторожевых мероприятий может быть использование малогабаритных автоматизированных плавсредств, способных выполнять поставленные задачи в штормовых условиях открытого моря, в сложных в навигационном отношении прибрежных акваториях, в том числе с соблюдением повышенных мер безопасности, экологической чистоты и скрытности обследования водной поверхности.
В результате выполнения в 2001–2003 гг. НИР «Поисковые исследования нетрадиционных решений по оптимизации формы корпуса корабля для повышения эксплуатационных и боевых качеств» [3] показана принципиальная возможность сохранения требуемых мореходных качеств корабля [2] в условиях интенсивного морского волнения. Это может быть использовано и при создании сверхмалых кораблей, управляемых из удаленных информационных береговых или корабельных центров и несущих на борту контрольно-измерительное оборудование [1]. Такие сверхмалые корабли способны решать широкий круг задач гидрофизического обследования морских акваторий и несения охранно-патрульной службы как в открытых морях, так и в сложных условиях плавания на мелководных участках морского побережья, в морских портах и во внутренних гаванях, в том числе в местах, опасных или недоступных для традиционных плавсредств.
Возможность одновременного применения нескольких самоходных аппаратов с измерительной аппаратурой, синхронно работающей в системе единого времени, существенно повышает эффективность комплексного мониторинга больших по площади морских и прибрежных акваторий.
Проектируемые и испытываемые сверхмалые корабли предназначены для проведения следующих морских работ:
Предусматривается теоретическое и экспериментальное исследование мореходных качеств двух вариантов сверхмалых кораблей:
Для обеспечения акустической скрытности маневрирования сверхмалого корабля при выполнении им охранно-сторожевых функций в качестве одного из вариантов движителей планируется изготовить и испытать малошумные машущие плавники.
Для комплексного изучения мореходных свойств сверхмалых кораблей и технических возможностей решения ими поставленных задач как в условиях интенсивного морского волнения, так и при плавании в прибойной зоне и на мелководьях вблизи побережья изготавливаются опытовые модели в реальном масштабе. Испытываются они в опытовом бассейне Государственного технического университета в г. Комсомольске-на-Амуре, оборудование которого адаптируется для проведения нетрадиционных исследований штормовой мореходности судов. Опытная проверка в реальных условиях плавания выполняется в морских акваториях вблизи о-ва Сахалин. В морских испытаниях одновременно изучаются технические условия по эксплуатации навигационного, гидроакустического, гидрофизического и другого измерительного оборудования, отрабатываются практические вопросы дистанционного управления сверхмалым кораблем и получения с него телеметрической информации.
Литература
Василий Николаевич Храмушин,
Андрей Семенович Корытко - СКБ САМИ ДВО РАН
Морские исследования и технологии изучения природы Мирового окена, Выпуск 1, 2005, с.176-178
Marine Researches and Technique of Ocean Studies. Issue № 1, 2005, p.176-178
V.N. Khramushin, A.S. Korytko. Shipbuilding researches for a small autonomous hydrophysical vessel.