 (1)
(1)Мореходство и морские науки - 2009
УДК 629.5.001, 656.6.052(Поисковые решения и инженерные подходы в целевом проектировании и гидродинамической оптимизации формы корпуса и общекорабельной архитектуры всепогодного океанского корабля)
Кроленко С. И. [2], наставник, Санкт-Петербург
Храмушин В. Н. [1], ученик, Южно-Сахалинск
Ключевые слова: судно, шторм, волны Герстнера, девятый вал, оптимизация формы, качка корабля, корабельные волны, решение Мичелла.
Keywords: ship, pitching, rolling, optimization, trochoidal wave, storm forces and reactions.
Stability of Ship and Ocean Vehicles - 2009. 10th International Conference, June 22-26, 2009. Proceedings. P.483-492, Saint-Petersburg.
Современное кораблестроение не отличается однообразием проектных решений по форме корпуса и общекорабельной архитектуре корабля, что формально свидетельствует об отсутствии унифицированных инженерных подходов для оптимизации гидромеханики внешних силовых воздействий с целью достижения наилучшей мореходности корабля в условиях штормового плавания и чрезвычайно опасных нагрузок под ударами гребней крутых волн и ураганных ветров.
Ныне мореплавание все более полагается на заблаговременное предупреждение об опасных морских явлениях по результатам дистанционного зондирования атмосферы и океанов, что нередко приводит к неприемлемо большим периодам простоев судов в ожидании у моря хорошей погоды.
Современный флот, как правило, имеет фундаментальное преимущество перед средневековыми кораблями и старинными пароходами, выражающееся в том, что любое океанское судно обладает избыточным запасом мощности главных двигателей. Надежная работа машин позволяет судоводителю активно маневрировать для предотвращения жестких захватов корпуса штормовой волной, а при неизбежном возникновении опасных коллизий, уверенно восстанавливать выбранный режим движения: вновь и вновь достигая заданной ходкости, или оптимизируя курс и скорость для умерения штормовой качки. В то же время, избыток мощности двигателей имеет следствием повышенный расход топлива на дальних переходах по тихому морю. Судно с ограниченной штормовой мореходностью теряет ход, и вынуждено использовать главные и рулевые машины в форсированных режимах исключительно для целей безопасного штормования, при котором ураганной стихией поверяется как техническая надежность корабельных механизмов, так и реальный опыт хорошей морской практики судоводителей.
В настоящем исследовании целесообразно вернуться к поверенным хорошей морской практикой историческим временам, отмеченным шедеврами кораблестроения эпохи становления океанского мореходства, когда непротиворечивое проектирование и единение корабля со штормовой стихией доверялось исключительно опытным капитанам и наиболее авторитетным мореплавателям. На этом пути можно выявить главные режимы штормового плавания корабля; означить рекомендации штурману по выбору курса и скорости для эффективного решения поставленных задач в любых: сложных, штормовых и ледовых условиях плавания; и, как следствие, путем сравнения выявить ключевые элементы формы корпуса и общекорабельной архитектуры для нового перспективного корабля, наилучшим образом отвечающем его предназначению.
1.1. Две математические модели наиболее опасных штормовых волн и гидромеханика их воздействия на надводный корабль |
Поддержание штормовой мореходности корабля возможно при правильном учете гидродинамических свойств трохоидального волнения с обрушающимися гребнями «девятых» валов, непознанная мощь и чрезмерная опасность которых отмечается ныне российскими и зарубежными исследователями.
В рамках теории Герстнера поле скорости и геометрическая форма гравитационных волн на глубокой воде оценивается параметрическим описанием траекторий частиц жидкости, движущихся в лагранжевых (локальных) координатах по циклоидам с переменным радиусом:
(1)Прогрессивные волны Герстнера представляют серьезную опасность для неуправляемого судна без хода, так как встречные течения в вершинах и впадинах волн стремятся поставить его корпус лагом, после чего возможен мощный силовой удар по надводному борту и последующее увлечение всего судна в интенсивный вихревой поток обрушающихся гребней штормовых волн.

На глубокой воде трохоидальные волны никогда не ходят поодиночке. После объединения в групповые структуры образуются «девятые» валы – волны-убийцы существенно большей высоты, но менее опасные по силовому гидродинамическому воздействию, т. к. сформировавшиеся «девятые» валы значительно теряют в скорости свободного движения (рис. 1).
Эмпирическое построение поверхности моря для групповой структуры трохоидальных волн возможно в результате наложения встречной системы регулярных волн с фазовым коэффициентом: x' = –0,889 · x и несколько меньшей высотой: a' = a/1,286.
 (2)
(2)Неоптимизированный для штормового плавания корабль может уклониться от вышеизложенного сценария кораблекрушения с помощью активного маневрирования, если у штурвала стоит опытный рулевой и вахтенный штурман обладает достаточными знаниями хорошей морской практики. Отчасти такие знания могут быть приобретены, если судоводители как минимум, примут непосредственное участие в испытаниях или проанализируют результаты мореходных экспериментов с самоходными моделями судов, вверенных им в управление.
Современные цифровые регистраторы качки и радиолокационные построители волнового поля также могут быть применены в системах автоматического штормового управления судном, как минимум обеспечивая экспертное или чисто аналитическое информирование судоводителей о выборе курса и скорости для эффективного хода или безопасного штормования. Наиболее эффективное решение проблем штормового плавания возможно только вкупе с проектированием специальной волностойкой формы корпуса корабля, чему можно найти множество великолепных прототипов в историческом кораблестроении.
1.2. Особенности штормового кораблевождения |
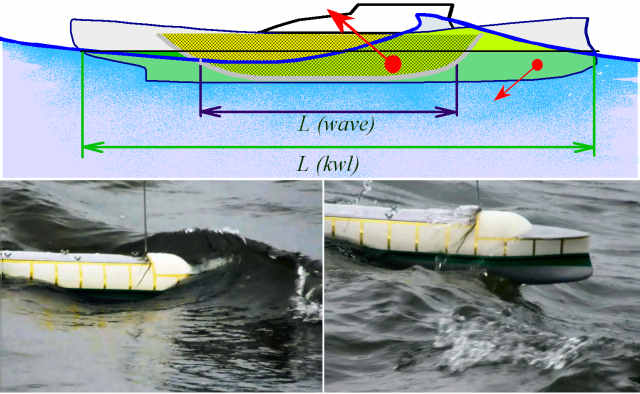
В практическом судовождении традиционно ориентируются на вполне адекватные модели волнения (рис. 2), которые представляются в виде наложения нескольких независимых систем волн: 1) ветровое волнение совпадает с направлением действия ветра, а высота и крутизна волн могут быть предельно большими; 2) две-три системы волн зыби, являющихся отголосками ранее прошедших или отдаленных штормов, при этом длина и протяженность волн зыби существенно больше, чем у ветровых, а крутизна – меньше.
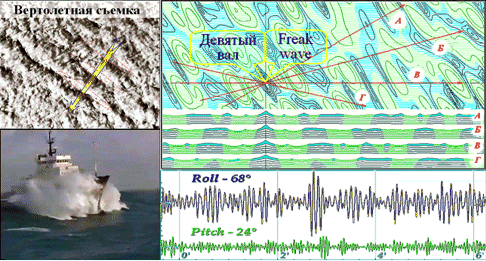
На ходу корабля 2–3 «девятых» вала проходят по борту (рис. 2), и лишь после этого возможно прямое столкновение с особо крупной штормовой волной (если рулевой ведет корабль не «по кочкам»). Принимая характерный период штормовых волн Охотского моря равным 8 с., для уклонения от жесткой встречи с крупной волной необходима заблаговременность прогноза «девятого вала» порядка 1–1,5 минут, что вполне осуществимо с помощью современных микропроцессоров.
Штормовое волнение не является катастрофичным, судоводителю всегда предоставляются большие участки штормового моря, на которых от-сутствуют особо крутые волны (рис. 2), где позволительно активное манев-рирование судна, в том числе для уклонения от встречи с гребнями особо крупных волн, так же, как и для предотвращения сваливания в глубокие впадины между волнами.
Гидродинамические условия штормового плавания становятся намного опаснее, если на мелководье глубина моря меньше длины штормовой волны. В этом случае, при сохранении групповой структуры пакетов волн, протяженность волновых фронтов заметно вытягивается, что затрудняет уклонение от встречи с опасными гребнями (рис. 3). «Девятые валы» уже не ведут себя подобно стоячим волнам и быстро перемещаются на большие расстояния с поддержанием интенсивно разрушающихся гребней, и способны наносить удары по корпусу корабля с максимальной скоростью водных потоков в гребнях волн.

В Охотском море, с характерным периодом штормовых волн порядка 8 сек., на мелководьях можно ожидать прямые удары 12-метровых волн с максимальной скоростью потоков воды в гребнях более 20 узлов, что может грозить любому судну катастрофическими последствиями. Именно такие условия штормового волнения складываются при плавании вблизи побережья, на якорных стоянках и мелководных банках, где рыболовный и каботажный флот вынуждены работать в течение всего навигационного сезона.
Важнейшим условием поддержания штормовой мореходности корабля является правильный учет гидродинамических свойств трохоидального волнения с обрушающимися гребнями, в том числе сводимых к моделям автоматического управления судном в условиях интенсивного волнения, способствующих как эффективности, так и безопасности штормового плавания (в отличие от привычных настороженностей и наставлений к пережиданию у моря спокойной погоды).
Сам факт участия в опытовых испытаниях мореходных качеств судна создает основу осознанных правил хорошей морской практики для судоводителей и обоснованных проектных решений по достижению наилучшей штормовой мореходности, всецело зависящих от особенностей формы корпуса, общекорабельной архитектуры и энерговооруженности конкретного судна.
Используемая на Сахалине трехмерная эмпирико-аналитическая модель морского волнения удовлетворяет законам гидромеханики волн большой высоты и вполне применима для поисковых исследований в качестве модели внешней среды как в случае разработки проектных оценок мореходности новых судов, так и для краткосрочных прогнозов силового воздействия волн в автоматических системах штормового маневрирования, с целью стабилизации качки и оптимизации ходкости корабля.
Эксплуатационная эффективность или боевая устойчивость корабля всецело зависит от условий океанского плавания, от суммарной интенсивности негативного воздействия на корпус и надстройки корабля со стороны штормового ветра и волнения. Если силовое воздействие внешней среды велико, то корабль теряет возможность движения в заданном направлении и лишается возможности активного использования судовых механизмов и вооружений. Несколько проще формулируются проектные условия для плавания исключительно по тихой погоде, однако и в этом случае нельзя пренебрегать штормовой мореходностью, хотя бы для поддержания возможности своевременного уклонения от заведомо непредсказуемых опасных явлений на море.
Мореходство на Дальнем Востоке России, кроме штормовых и ледовых условий, осложняется еще и отсутствием обустроенных портов-убежищ, отчего даже на каботажных коммуникациях допустимо использование флота с повышенными штормовыми мореходными качествами.
За редким исключением достижение оптимальной штормовой мореходности может серьезно противоречить эксплуатационным требованиям к кораблю как к плавучей платформе для грузов и оборудования. В реальной морской практике достижение превосходных мореходных качеств сказывается лишь на эстетическом облике корабля, давая морякам подтверждение изречения, что «на борту красивого корабля нет ничего лишнего».
2.1. Режим штормового хода навстречу и по волне |
Для многих современных кораблей штормование носом на волну является единственно возможным режимом безопасного плавания в условиях ураганного ветра и волнения. Удержание штормового курса требует особой активности рулевого (авторулевого) и повышенной нагрузки на главных двигателях и рулевых машинах (рис. 4), постоянно подвергающихся чрезмерным перегрузкам в условиях интенсивной качки и оголения гребных винтов в кормовой оконечности корпуса. В случае аварии главной машины или рулевого устройства пассивный выход на курс на волну возможен при постановке штормовых парусов или плавучих якорей как единственного средства спасения или штормовой устойчивости старинных парусников и кораблей с относительно малой мощностью двигателей. Килевая качка и продольные изгибные нагрузки на корпус корабля достигают на этом курсе своих экстремальных значений. При увеличении скорости хода возрастает размах килевой качки, появляется опасность сокрушительных ударов встречных волн по широким носовым скулам, палубам и надстройкам, а также днищевого слеминга и глубокой зарываемости под встречную волну.

Если же носовые обводы корабля оптимизированы для штормового плавания, имеют малый надводной объем, завал борта и форштевня в носовой части, подобно историческим кораблям конца XIX века, то без чрезмерных гидродинамических перегрузок возможно увеличение хода и достижение режима, при котором видимый период встречных волн станет меньше собственных периодов продольной качки корпуса. Безусловно, плавности килевой качки будет способствовать заострение и уменьшение полноты носовых ватерлиний, в том числе надводных, что одновременно приведет к снижению силовых нагрузок при высокоскоростном контакте с гребнями встречных волн.
На курсе по волне килевая качка становится плавной, а судно приобретает возможность дельфинирования – свободного движения со скоростью распространения штормовых волн. Это крайне опасный режим плавания.
На ходу по волне корабль обязательно должен держать предельно полный ход вперед. Поток от гребных винтов, набрасываемый на перо руля, должен быть достаточно интенсивным, чтобы гребень волны, догоняющий корабль, не смог ослабить или реверсировать управляющее действие пера руля. Если есть сомнение в работе рулевого устройства, то вахтенному штурману лучше выйти на корму корабля и убедиться, что взбуруненный поток из под гребных винтов не подавляется при подбрасывании кормового подзора на гребне догоняющей волны. Если же это условие не выполняется, что вполне естественно для маломощных рыболовных судов, то при ударе девятого вала под кормовую раковину вместо удержания судна на курсе рулевой может заложить крутую циркуляцию, что грозит быстрым опрокидыванием (эффект брочинга).
Штормовая устойчивость корпуса при плавании по волне достигается устройством узкой крейсерской кормы (рис. 5) с относительно малым объемом и заостренными надводными ватерлиниями в кормовой оконечности. Такой корпус не допустит резкого подбрасывания кормы догоняющей волной и удержит винторулевой комплекс на достаточном заглублении, где трохоидальное падение скорости под гребнями волн уменьшит опасность реверсивной работы пера руля.

2.2. Активный ход вразрез штормовой волне |
Штормование малыми ходами носом на волну сопровождается резкой и изматывающей килевой качкой. Если мореходные качества судна позволяют (отсутствуют бульб и развесистые скулы в носовой оконечности), то в штормовую погоду можно выбирать ход вразрез волне – бейдевинд. Корабль приобретает ходкость и начинает отслеживать удлиненную поверхность волн при вполне умеренном возрастании бортовой качки.

Работающие машины обеспечивают удержание кормового подзора относительно среднего уровня моря, что обеспечивает общую эффективность работы гребных винтов и поддержание управляемости. Невозможно добиться жесткого и управляемого позиционирования относительно поверхности волны для кормовой и носовой частей корпуса одновременно. По крайней мере, носовая часть корабля должна быть полностью раскрепощена и допускать свободное рыскание и безударное вертикальное перемещение в темпе килевой качки.
Движение косым курсом по волне – бакштаг – необходимо для уклонения от встречи с тайфунами или для ускоренного выхода из центра штормового циклона. Для этого имеются все условия: килевая и бортовая качки становятся плавными; скорость хода корабля значительно возрастает за счет энергии попутных волн. Однако, если надводная форма корпуса, подводные обводы и винторулевой комплекс корабля не оптимизированы специально для этого режима штормового хода, то косой курс по волне становится чрезвычайно опасным. Корабль может отчасти потерять ход, откатываясь назад по наветренному склону крупной штормовой волны, и затем оказаться в жестком захвате под гребнем «девятого вала», где широкий кормовой подзор и реверсивное действие пера руля приведут к быстрой циркуляции на курс лагом к волне, сильному крену и опасности мгновенного опрокидывания под действием чисто гидродинамических сил.
2.3. Аварийное плавание или особые режимы хода лагом к волне |
На глубокой воде в открытом море, на ходу корабля или в режиме аварийного штормования без хода лагом к волне, на верхнюю палубу попадает наименьшее количество воды. Этому способствует высокая поперечная остойчивость; симметрия корпуса относительно мидель-шпангоута; наличие высоких штевней и развал борта по всей длине корабля, с наибольшим наклоном над поверхностью воды в районах кормовой и носовой скул в оконечностях корпуса. Если корабль способен держать полный ход, то особых требований к кормовым обводам может не предъявляться до тех пор, пока развал борта в носу и в средней части корпуса способен отражать всю энергию падающих на корабль штормовых волн.
Безопасность корабля снова обеспечивается особыми гидродинамическими условиями в гребнях наиболее крупных волн и «девятых валов», которые на глубокой воде проявляют себя подобно стоячим волнам, не стремящимся к бортовому удару по корпусу корабля.
Гидродинамика такого плавания связана с удержанием поверхности верхней палубы параллельно наклонам штормовых волн и вполне применима для малых беспалубных судов. Такой режим штормования абсолютно не приемлем для кораблей большого водоизмещения, так как резкая качка с большим размахом в темпе штормовых волн приводит к невыносимым условиям обитаемости и не может быть обеспечена достаточной прочностью корпуса корабля.
И все же для режима хода лагом к волне не возникает проектных и эксплуатационных противоречий по минимизации силового воздействия штормовых волн на корпус корабля (рис. 3). В частности, если начальная остойчивость мала и период бортовой качки корабля значительно больше периода штормовых волн, то размах качки заметно уменьшается, а штормовые волны начинают свободно перехлестывать через палубу, создавая особые гидродинамические условия для реверсирования силового воздействия штормовых волн и полной компенсации бортовой качки.
Исходный поиск оптимальной формы корпуса корабля выполняется на основе интеграла Джона Генри Мичелла (1898), физическая и геометрическая интерпретация которого позволяет выявить взаимосвязь между корабельным волнообразованием на больших скоростях хода и силовым воздействием на корпус корабля со стороны морского волнения. В практическом проектировании для оптимизации формы корпуса имеется вполне достаточный выбор гидродинамических и гидростатических сил, распределение которых вдоль корпуса определяются исключительно геометрическими особенностями судовых обводов.
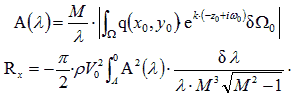
Rx – волновое сопротивление корабля при скорости движения V0. Все величины в интеграле Мичелла приведены к размерным физическим функциям и аргументам: A(l) – амплитуда излучаемой корабельной волны;  – соотношение длин для максимальной поперечной волны L к расчетной фазовой волне l; k = 2·p/l – волновое число для данной фазовой волны;
– соотношение длин для максимальной поперечной волны L к расчетной фазовой волне l; k = 2·p/l – волновое число для данной фазовой волны;  – круговая частота расчетной волны во времени.
– круговая частота расчетной волны во времени.
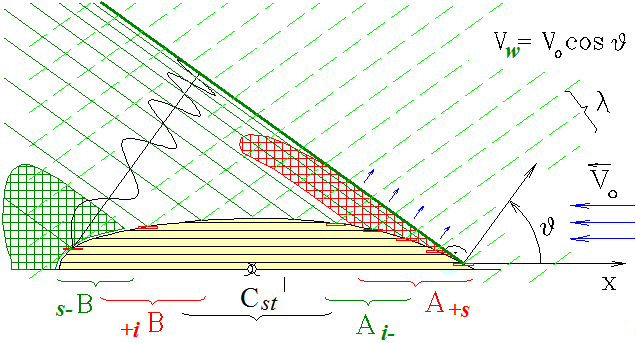
Физико-геометрическая интерпретация гидродинамических процессов в интеграле Мичелла показывает механизм отражения от корпуса корабля внешних волн, набегающих под косыми углами J в диапазоне длин: l Î [ 0 ¸ L = 2×p×V02/g], где: L – длина поперечной корабельной волны, соответствующая скорости хода V0. В расчетах учитывается, что в оконечностях корпуса корабельная волна не может оторваться от корпуса и волновые процессы заменяются ударным суммированием амплитуд коротких волн в форме простого источника жидкости вблизи судовой обшивки.
В частном случае для анализа возникновения кренящих моментов оптимизация корабельных обводов сводится к поиску геометрических форм для пропуска штормовой волны через корпус корабля с минимальными искажениями, что должно обеспечиваться даже в условиях интенсивной вертикальной и килевой качки корабля на крупном штормовом волнении.
3.1. Корабль без бортовой качки на волнении |
Патент на изобретение России № RU 236 0827 C2 от 10 июля 2009 г.
Непротиворечивое проектирование в качестве наивысшего приоритета считает гидродинамические принципы минимизации силового воздействия штормовых волн на корпус корабля, что неплохо согласуется с требованиями по достаточности запаса остойчивости на больших углах крена (динамической остойчивости корпуса) при предельно малой метацентрической высоте. Формально из этого следует, что в открытом море судно качается настолько медленно, что периодичность воздействия океанских волн всегда чаще собственных периодов ботовой качки корабля, в том числе и на больших углах крена. Замечание о больших углах крена в проектировании формы корпуса означает также малую и строго регулируемую вертикальную асимметрию формы подводных обводов и надводного борта, предотвращающих «ударные» гидростатические перегрузки при быстрых качаниях поверхности штормовых волн. Форма мидельшпангоута в этом случае имеет отношение ширины к осадке, близкое к двум, что исключает «паразитное» возрастание плеч кренящих штормовых сил; обеспечивает малую изменчивость остойчивости формы корпуса на больших углах крена; и, соответственно, завершает концептуальное построение обводов и внешнего облика судна, оптимизированного для плавания произвольным курсом относительно штормовых волн с минимальной бортовой качкой.
Указанные проектные тезисы применимы к различным классам морских судов. Рассмотрим вариант всепогодного быстроходного корабля, самые первые опытовые эксперименты с которым показали практически полную компенсацию штормовых кренящих сил на всех ходах под любым курсом относительно волн большой высоты.
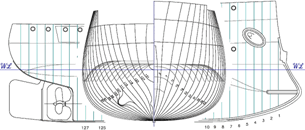
Для исключения интенсивной бортовой качки в условиях штормового волнения в средней части корпуса устраивается завал борта порядка 10–20 градусов (рис. 8), который на уровне действующей ватерлинии является максимальным или образующим точку перегиба на шпангоутных контурах теоретического чертежа. Это позволяет учесть гидродинамические особенности крупных штормовых волн, всегда имеющих трохоидальную природу с распределением скоростей течений по круговым траекториям с переменным радиусом (рис. 3).
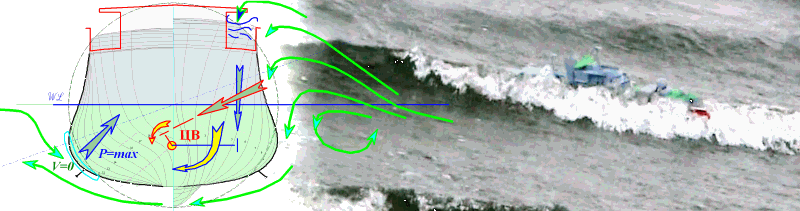
Вблизи заваленного надводного борта корабля гребни крупных штормовых волн притормаживаются только в своей нижней части. Это создает гидродинамические условия для затягивания потока жидкости под днище корабля, осадка которого должна быть соизмерима с полушириной корпуса. Интенсивный поток приводит к перераспределению гидродинамических давлений, отчего, с учетом дрейфового движения корабля по ветру, нулевая (критическая) скорость суммарных течений смещается на подветренный борт, чем компенсируется гидростатическая составляющая кренящего момента на наклонной поверхности штормовой волны. Затягивание волнового потока под корпус также необходимо для образования компенсирующих вязкостных сил на бортовых килях, так как иначе эти кили создают неблагоприятные кренящие моменты под действием дрейфового движения корпуса.
Корпус корабля, с вогнутыми шпангоутными контурами на уровне действующей ватерлинии, приобретает ярко выраженную S-образную диаграмму остойчивости, что позволяет безопасно снижать начальную остойчивость с целью увеличения периода бортовой качки без снижения критериев динамической остойчивости корабля в условиях штормового плавания в целом.
Испытание самоходной модели корабля на регулярном волнении в опытовом бассейне и в условиях штормового волнения в открытом море в полной мере подтверждают практически полное гашение бортовой качки корабля как на ходу, так и в условиях аварийного плавания без хода [3]. Видеозаписи мореходных испытаний опубликованы на сервере YouTube на странице: http://www.youtube.com/Khramushin под заголовками: «Ship with small rolling on heavy waves in towing tank» (Малая бортовая качка корабля на крупной волне в опытовом бассейне, 01:40) и «Historical Ship on Hurricane Storm Waves» (Исторический корабль на волнах ураганного шторма, 06:35).
3.2. Корабль без килевой качки на ходу на волнении |
Заявка на изобретение: RU-2007133625 от 07.09.2007.
Для полной компенсации килевой качки недостаточно пассивных средств минимизации внешних сил. Динамическая стабилизация килевой качки возможна на ходу корабля, если в форме корпуса корабля учтены гидродинамические особенности силового взаимодействия удлиненного корпуса с одиночными трохоидальными штормовыми волнами на глубокой воде.
Стабилизации килевой качки на больших скоростях хода способствуют скуловые обводы в носовой части корпуса, образующие плавно закрученную поверхность для затягивания набегающего потока под днище в районе скулы, в зоне образования первого гребня носовой корабельной волны (рис. 8). Проектный поиск оптимальной формы корпуса строится на исключении ходового дифферента на больших скоростях хода на тихой воде (рис. 9), обеспечиваемого на всех осадках в полосе допустимой вертикальной качки корабля. Опытовые испытания оптимизированных моделей показывают, что на практике энергия штормовых волн не компенсируется в полной мере, и вместо килевой начинает проявляться усиление вертикальной качки корпуса. Возможно, это является оптимизационным критерием, но все же вертикальная качка не столь сильно сказывается на снижении ходкости корабля, и в целом она не столь сильно отражается на условиях обитаемости, не способствует ударным волновым нагрузкам на корпус корабля.
Предотвращение интенсивной килевой качки на ходу корабля способствует поддержанию очень важных мореходных качеств, и позволяет оптимизированному кораблю:
v – сохранять высокую скорость хода в штормовую погоду;
v – идти любом курсом относительно штормовой волны;
v – значительно снизить заливаемость верхних палуб;
v – полностью исключить зарываемость под встречные волны;
v – избежать опасные захваты корпуса гребнем большой волны;
v – уменьшить ускорения внутри корпуса и улучшить сохранность и надежность крепления грузов;

Видеоматериалы мореходных экспериментов опубликованы на YouTube [4] под заголовками: «China ship from Marco Polo with Flapping Wing Propulsion» (Китайское судно Марко-Поло с машущим крыльевым движителем, 02:20), and «China-1275 from Marco Polo's Map with Ship on Pacific Ocean» (Китай-1275, корабль с карты Марко-Поло в Тихом океане, 02:25).
В случае потери хода все стабилизационные гидродинамические эффекты исчезаю и корпус корабля вновь обретает вполне ощутимую килевую качку.
Повышенная штормовая мореходность корабля, высокая ходкость и минимальность килевой качки на полном ходу в условиях интенсивного волнения нередко обеспечиваются особыми кормовыми обводами для устойчивой работы винто-рулевого комплекса. В этом случае аварийные ситуации, связанные с потерей хода, усугубляются чрезмерными силовыми воздействиями штормовых волн на кормовую оконечность корабля. Однако именно интенсивное вертикальное раскачивание кормового подзора под ударами штормовых волн может эффективно использоваться для приведения в действие пассивных крыльевых движителей, в качестве которых могут быть задействованы активные стабилизаторы килевой и бортовой качки корабля.
3.3. Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель |
Патент RU-238 4457 C2 от 20.03.2010.
Минимизация внешних воздействий, построенная на принципах взаимного снижения восстанавливающих и кренящих сил и моментов, как это часто и бывает в сложной технике, приводит к усилению негативных проявлений другой или второстепенной природы, изначально считавшихся незначительными. Так, стабилизация качки за счет уменьшения моментов инерции площади действующей ватерлинии может привести к излишнему крену под действием ветра или перекладок рулей; к избыточному дифференту при ускорении или реверсировании хода.
Для эффективной компенсации остаточных воздействий должны использоваться активные стабилизаторы бортовой и килевой качки, обладающие достаточной управляющей энергией для компенсации всех изначально неучтенных и «незначительных» внешних сил.
В штормовых условиях стабилизированный по направлению поток жидкости вблизи корпуса корабля, идущего полным ходом вперед, имеется только под кормовым подзором, непосредственно за работающими гребными винтами. Именно здесь возможно получение наибольших сил для активной стабилизации крена и дифферента корабля как в штормовую погоду, так и при быстрой циркуляции на тихой воде.
В случае потери хода кормовая часть корпуса получает значительные вертикальные колебания под воздействием штормовых волн, что обусловливается полными ватерлиниями и большим надводным объемом корпуса над кормовым подзором, устраиваемым для обеспечения безотрывного потока в зоне действия гребных винтов. Интенсивные вертикальные раскачивания являются необходимым условием для работы крыльевых устройств в качестве машущих плавниковых движителей, которые активизируются в наиболее опасных режимах штормового плавания корабля с остановленными машинами. Пассивный плавниковый движитель не требует дополнительных силовых или управляющих воздействий на крыльевые устройства, а упругий поворот (люфт) баллеров на угол до ±30° будет одновременно уберегать корпус от ударных воздействий на корпус со стороны штормовых волн, что не менее важно и в режиме активной стабилизации качки на ходу корабля.
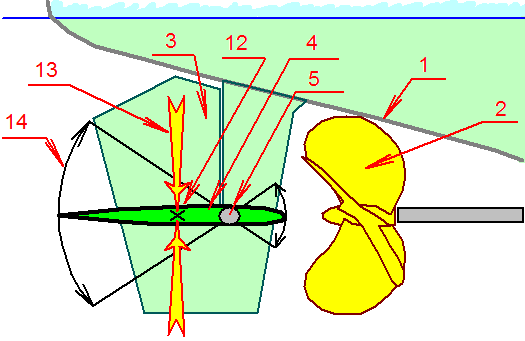
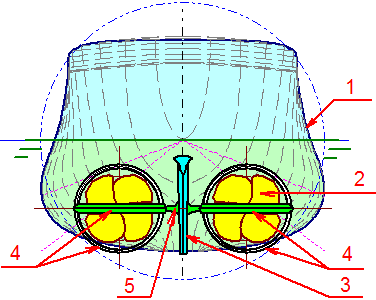
Рис. 11. Винторулевой комплекс с вертикальным рулем (3) и горизонтальными крыльями активных успокоителей килевой и бортовой качки (4), которые в случае остановки гребных винтов (2) работают в качестве аварийных штормовых движителей. 1 – оптимизированный корпус корабля; 4 – крыло может быть жестко соединено с поворотными насадками; 5 – горизонтальный баллер установлен строго на линии балансирной оси для потока за гребным винтом и допускает упругий поворот на угол порядка ±30°; 12 – центр площади горизонтального крыла, к которому сводится суммарная сила (13) при вертикальных перемещениях кормовой части корабля; 14 – угол пассивного упругого поворота плоскости крыла
Патент № RU 2384456 C2, от 20 марта 2010 г. Бюл. № 8.
Вышеизложенные ключевые решения использованы в проекте перспективного патрульно-гидрографического корабля, способного нести непрерывное всепогодное дежурство в акваториях Сахалина и Курильских островов, поддерживая постоянную готовность к скоростным переходам в сложных и штормовых условиях плавания, обеспечивая тем самым эффективную охрану морских рубежей, безопасность мореплавания, непрерывный контроль и своевременное предупреждение об опасных морских явлениях. Повышенная штормовая мореходность является условием использования гидрофизического, гидрометеорологического, экологического и другого специального оборудования для всепогодного мониторинга моря и атмосферы, для адаптации вычислительных алгоритмов и материалов космического зондирования с целью анализа надводной и подводной обстановки в обширных морских акваториях Дальнего Востока России.
Историческими прототипами нового патрульно-гидрографического корабля являются эскадренные миноносцы конца XIX века [1], обладавшие отличной штормовой мореходностью. Для согласования всего комплекса технических требований использованы принципы непротиворечивого проектирования сложных морских сооружений, основанные на современных инженерных подходах и опыте хорошей морской практики.
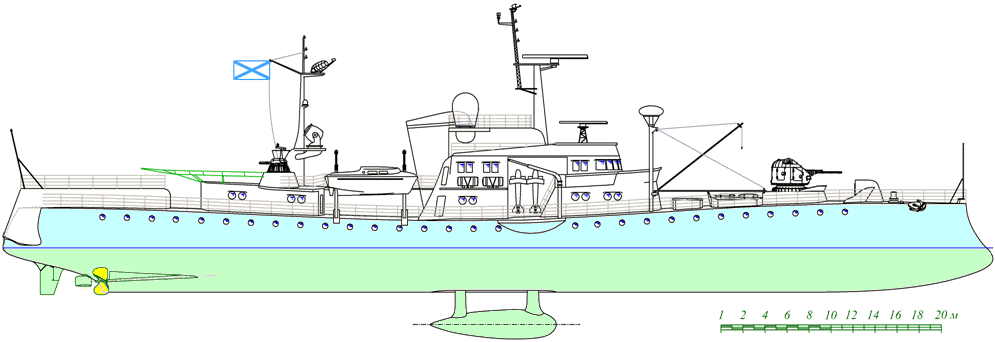
Общекорабельная архитектура корабля оптимизирована для решения широкого круга задач мирного времени, связанных с решением поисковых и научно-исследовательских задач, спасением человеческой жизни на море и обеспечением безопасности мореплавания в штормовых и ледовых условиях дальневосточных морей России и северо-западной части Тихого океана. Минимум вооружений достаточен для самообороны корабля, для эффективной борьбы с пиратскими и контрабандистскими судами, с одиночными рейдерскими крейсерами противника. Проектом корабля предусматривается возможность одновременного использования всех видов современного научного гидрофизического оборудования, которое может быть использовано для автономного и всепогодного ведения морской разведки, в том числе с целью быстрого и эффективного использования морского артиллерийского и ракетного оружия корабля.
Корабль имеет надводный запас плавучести, не превышающий водоизмещения. На корпусе отсутствуют скуловые и днищевые кили (учтена категорическая недопустимость крыльевых стабилизаторов качки в средней части корпуса). В результате дискуссии с заказчиком принят компромисс и рассмотрен дополнительный «традиционный» вариант установки подкильной гидроакустической станции:
1 – оптимальный (рис. 12) – в средней части корпуса в виде выдвижной хорошо обтекаемой гондолы, закрепленной на двух узких стойках, не оказывающих влияния на поперечные потоки воды при бортовой качке корабля;
2 – традиционный (рис. 13) – в обтекателе носового бульба, что крайне негативно сказывается на штормовой устойчивости и управляемости корабля. На бульбе устроен штормовой подрез форштевня.
Форма корпуса, обводы и общекорабельная архитектура корабля оптимизированы для достижения наилучших штормовых мореходных качеств, необходимых для дальних океанских походов, с возможностью удержания высокой скорости хода любым курсом относительно ураганного ветра и штормовых волн с минимальной бортовой и килевой качкой и, как следствие, для постоянной готовности к использованию всех бортовых и забортных средств морской разведки и систем корабельных вооружений.
| Основные технические характеристики корабля: | |
| Длина наибольшая | Lmax = 90,0 м |
| Длина по ватерлинии | Lkwl = 88,6 м |
| Ширина корпуса / по ватерлинии | Bmax = 10 м / Bkwl = 9 м |
| Осадка / со стационарной ГЛС в бульбе | Tол= 4 м / Tбульб= 5 м |
| Высота надводного борта | Ннадв = 2,5 м |
| Водоизмещение | W = 1920 т |
| Коэффициент общей полноты | d = 0,48 (d kwl = 0,6) |
| Площадь смоченной поверхности корпуса | S = 1050 м2 |
| Расчетная скорость хода | V = 25 узлов |
На борту корабля имеются противокорабельное и зенитное вооружение; радиолокационные комплексы контроля надводной обстановки и специальные системы гидрометеорологического наблюдения; кормовая аппарель для спуска на воду крупного автономного или буксируемого плавсредства, а также гидрофизическое и гидрографическое поисковое оборудование, в том числе представленное самоходными надводными и подводными аппаратами и буксируемыми параванами. При проведении подводных поисковых или гидрографических работ корабль способен образовать широкое поле самоходных и буксируемых гидрофизических станций, обеспечивая покрытие большой по площади акватории за один галс, или создать широкое поле для пассивной/активной локации, в том числе на сверхнизких электромагнитных или акустических частотах.
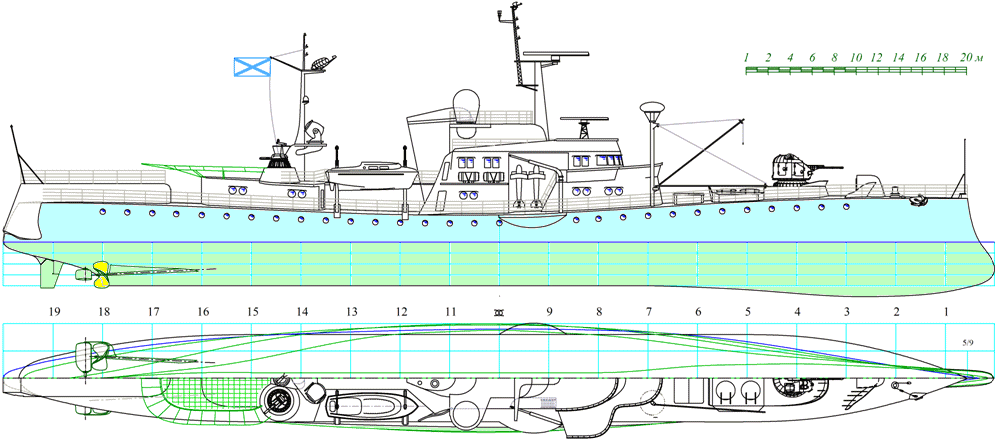
В средней части корпуса имеется завал борта с максимальным углом наклона шпангоутов на уровне действующей ватерлинии (рис. 13, корпус). Продольное распределение высоты борта корабля выполнено с таким расчетом, чтобы в штормовых условиях на любом участке борта на верхнюю палубу корабля могло заливаться примерно одинаковое количество воды. На корабле не устанавливаются надстройки по ширине палубы от одного до другого борта, а все крупные надпалубные конструкции сделаны в виде рубок, с единственным протяженным по длине корабля широким проходом в районе мидель-шпангоута. Это означает, что при захлестывании волнового гребня на палубу корабля вся масса воды останется на том же борту, что создаст спрямляющий момент после удара волны о борт корабля.
Корабль имеет крейсерскую корму, при этом вся кормовая часть корпуса имеет завал надводного борта, что необходимо для исключения захвата корпуса попутной волной и недопущения брочинга. Кормовой подзор короткий и не образует избыточно большого надводного объема, что допустимо при использовании двухвинтовой схемы винторулевого комплекса. Непосредственно за гребными винтами установлены подпружиненные горизонтальные крылья активных успокоителей качки [4], которые при остановке главных двигателей начинают работать в качестве штормовых машущих крыльевых движителей, воспринимающих энергию вертикальных перемещений кормовой части корабля относительно поверхности воды.
Подводная часть форштевня имеет косой подрез, а надводная ветвь форштевня завалена в корму (рис. 11), что необходимо для снятия ударных нагрузок на корпус при прорезании гребней штормовых волн на полном ходу корабля. Заваленный форштевень всегда под тупым углом подрезает гребни встречных волн, а подводный подрез форштевня дает возможность самопроизвольного отклонения от курса (рыскания), что исключает концентрированные удары волн о развал скулы надводного борта. Ветви носовых шпангоутов в надводной части имеют небольшой развал, создающий гидродинамические силы всплытия при заныривании верхней палубы под гребни крупных штормовых волн на полном ходу корабля. Подводные ветви носовых шпангоутов образуют закрученную поверхность, начинающуюся от небольшого завала борта над бульбом, плавно направляющую встречные потоки воды под днище корабля. Таким образом затягивается вниз и гасится гребень расходящейся корабельной волны и аналогично пропускается под днище встречная штормовая волна.
Диаграмма плеч статической остойчивости формы (рис. 13) имеет S-образность. Угол заката диаграммы остойчивости уходит на 180°, что формально означает абсолютную остойчивость. Добавление объема палубных рубок в расчеты восстанавливающих моментов на больших углах крена приведет к невозможности опрокидывания корабля.
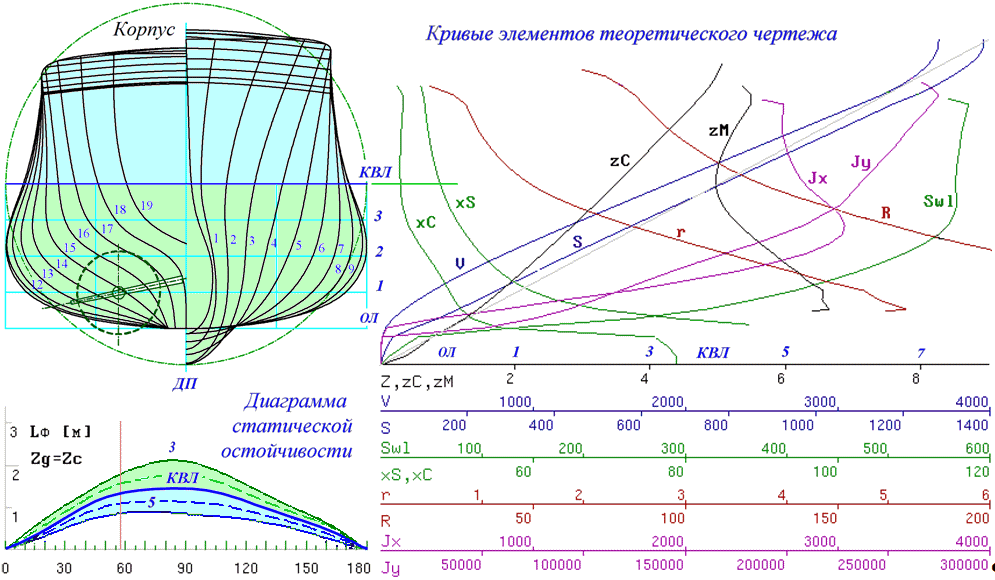
Для оценки поведения корабля на волнении введем понятие полосы активных ватерлиний, которая для данного корабля будет составлять ±1,25 м. В этой полосе будет проявляться силовое воздействие морских волн с высотой порядка 3–4 м.
Анализ гидростатических кривых (рис. 14, кривые элементов теоретического чертежа) выявляет следующие мореходные качества корабля:
– на уровне действующей ватерлинии корпус имеет минимум аппликаты метацентра (zM), что обеспечивает безусловное поддержание заданной остойчивости при вертикальной качке корабля на интенсивном штормовом волнении;
– в полосе активных ватерлиний, за счет завала бортов, при погружении корпуса быстро уменьшается поперечный момент инерции (Jx) и метацентрический радиус (r). Это означает, что при подъеме уровня воды вблизи одного борта одновременно происходит частичное гашение гидростатических кренящих моментов. Если в это же время на противоположном борту происходит опускание уровня воды, то быстрый рост условного метацентрического радиуса (r) создает условия для компенсации одностороннего недостатка плавучести за счет увеличения плеча восстанавливающего момента. Указанный эффект не исключает полностью, а лишь снижает кренящий момент на наклонах поверхности моря, однако специально спроектированная форма корпуса может полностью погасить бортовую качку корабля, возникающую в результате совместного силового воздействия гидростатических и гидродинамических сил со стороны трохоидального волнения (в случае развала бортов в средней части корпуса моменты гидростатических и гидродинамических сил действуют негативно и складываются, обусловливая увеличение интенсивности бортовой качки даже на слабом волнении);
– в зоне активных ватерлиний абсцисса центра величины (xC) практически не изменяется, в то время как центр площади ватерлиний (xS) смещается в корму (сближается с xC) при погружении корабля и в сторону бульба/форштевня – при всплытии. Это означает, что в условиях интенсивного волнения корабль будет накапливать динамический дифферент на нос, необходимый для компенсации сил всплытия в районе развала надводных ветвей носовых шпангоутов и предотвращения отрыва носовой оконечности корабля от поверхности воды при прохождении через гребни крупных штормовых волн;
– несмотря на то, что площадь действующей ватерлинии (Swl) практически не изменяется, в активной полосе продольный момент инерции действующей ватерлинии (Jy) быстро растет при погружении корпуса за счет развала бортов в оконечностях, что обеспечивает традиционное демпфирование килевой качки и удержание палубы корабля параллельно локальным участкам волновых склонов.
На высоком острове ходовой рубки расположены ниши для хранения и быстрого спуска за борт самоходных гидрофизических модулей и параванов, над рубкой установлены системы внешнего воздушного наблюдения. Все бытовые и служебные помещения размещены внутри герметичного корпуса, верхняя палуба которого является главной водонепроницаемой палубой корабля. Вдоль правого борта проходит сквозной коридор, разделенный автоматическими дверями на водонепроницаемых переборках, все жилые и служебные помещения расположены по левому борту. Судовые машины и механизмы, грузовые помещения и танки для жидких грузов находятся ниже верхнего жилого яруса в корпусе корабля.
Опытовые мореходные испытания самоходной телеуправляемой модели корабля в опытовом бассейне на регулярном волнении, так же, как и испытания на реальном ветровом волнении в открытом море, полностью подтвердили правильность выбранных технических решений по форме корпуса и общекорабельной архитектуре корабля:
– потери хода при движении корабля произвольным курсом относительно крутых волн, высота которых превышала высоту корпуса корабля вместе с надстройками, не превышают 25–30%;
– бортовая качка как на полном ходу корабля, так и при остановке машин остается минимальной, что ярко проявлялось в сравнении с наклонами поверхности штормовых волн;
– углы дифферента и вертикальные ускорения в оконечностях корабля составляют 20–30 % от естественных вертикальных ускорений частиц жидкости на поверхности воды;
– даже под воздействием крупных гребней штормовых волн, ударяющих в центральную рубку и полностью накрывающих другие более низкие палубные конструкции, корабль не подвергался большим накренениям.
Форма корпуса и общекорабельная архитектура в целом удовлетворяют принципам непротиворечивого проектирования корабля, согласующим все технические решения без взаимных противоречий. Корабль соответствует главному правилу хорошей морской практики, чтобы на его борту не было ничего лишнего.
Аналитические и экспериментальные исследования штормовой мореходности кораблей и судов различного назначения привели к построению ключевых положений непротиворечивого проектирования общекорабельной архитектуры и обводов формы корпуса, способствующих повышенной ходкости, плавности качки и безопасности плавания в условиях интенсивного штормового волнения. Эксперименты на регулярном волнении в опытовом бассейне Комсомольского-на-Амуре государственного технического университета и последующие испытания телеуправляемых моделей в открытом море у побережья о. Сахалин показали превосходные штормовые мореходные качества у всех оптимизированных моделей кораблей и судов различного назначения.
Для законченного решения проектно-оптимизационной задачи предложены новые технические решения по активной стабилизации остаточной качки на ходу корабля. Как это и полагает хорошая морская практика, новые крыльевые стабилизаторы удалось задействовать также и в качестве аварийных штормовых движителей, что стало хорошим проявлением принципов непротиворечивого проектирования сложных морских устройств.
Настоящая работа инициирована госзаказом Главного управления кораблестроения России и доведена до современного уровня при поддержке гранта нефтепромысловой компании «Сахалинская Энергия», выполненного Сахалинским отделением Русского географического общества. Особую признательность автор выражает С. В. Антоненко и В. Г. Бугаеву (кафедра теории и проектирования корабля ДВГТУ), а также Н. А. Мытнику и Н. А. Таранухе (кафедра кораблестроения КнАГТУ) – как истинным соавторам всех новых кораблестроительных решений.
1. Храмушин В. Н. Поисковые исследования штормовой мореходности корабля. – Владивосток: Дальнаука, 2003. – 172 с. (www.shipdesign.ru\Ship_00.html)
2. Michell, J. H. The wave resistance of a ship // Philosophical Magazine. – Ser. 5. – London: 1898. – Vol. 45. – P.106–123. (www. shipdesign.ru/JHM.html)
3. Корабль без бортовой качки на волнении. Храмушин В. Н. Патент № 2360827 от 10 июля 2009 г. (www.Youtube.com/Khramushin - «Ship with small rolling on heavy waves in towing tank», «Historical Ship on Hurricane Storm Waves»)
4. Корабль без килевой качки на ходу на волнении. Храмушин В. Н. Заявка на изобретение России № 2007133625 от 07.09.2007 г. (www.Youtube.com/Khramushin - «China-1275 from Marco Polo's Map with Ship on Pacific Ocean»).
5. Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель. Храмушин В. Н. Патент № 2384457, от 20 марта 2010 г. Бюл. № 8. Заявка на изобретение № 2008116649, от 24.04.2008 г. (решение о выдаче патента от 21.07.2009 г).