
Моим друзьям-волжанам,
Ольге Солдатовой.
Рассматриваются взаимосвязанные аспекты непротиворечивого проектирования и сопутствующие инженерные решения в гидромеханике сложных нестационарных потоков, оптимизирующих управляемые движения гибких лопастей и жестких крыльев машущих плавниковых движителей и гидродинамических стабилизаторов. Обсуждаемые процессы гидромеханики предваряются необходимыми техническими решениями для практической компоновки специальных механизмов, в достаточной степени воссоздающих сложные потоки на крыле-плавнике и в его окрестностях, требуемых для оптимизации кинематики и выравнивания импульсов от полезных знакопеременных силовых реакций, и особо для вызванных и внешних проявлений градиентных и вихревых срывов течений. Соответственно, проектные заключения сводятся к исключению или уменьшению срывов потоков, силовых сбросов и ударных нагрузок на забортных устройствах и их механизмах, в том числе путём взаимного и непротиворечивого согласования обводов и архитектурных особенностей корабля в целом.
Гидромеханика малых скоростей и соизмеримо больших ускорений не в полной мере покрывается точными математическими моделями, так же как не определяется дискретными и однозначными вычислительными экспериментами или косвенными алгоритмическими расчетами. В области нестационарной гидромеханики только разрабатываются методы тензорной математики [4, 5], где для пространственной аппроксимации задействуются операции произведения по аналогии с методами флюксий, параллельно с дифференциальным разностями и интегрированием только в отношении операций по скалярному аргументу с абсолютными отсчетами времени.
В проработке вопросов гидромеханики машущего крыла видится важным некоторое доопределение терминологии, в частности: расширение понятия «угла скольжения» – в качестве локального «угла атаки» в сильно искривленных линиях тока и траекториях частиц жидкости; повсеместное согласование постулатов Жуковского о стекании с задней кромки машущего крыла; законов Бернулли о перераспределении давлений при взаимовлиянии смежных подобластей с различной интенсивностью течений; и формальных аксиом о суперпозиции вихревых потоков и поступательных течений в идеальной невязкой и несжимаемой жидкости.
Проведенный анализ процессов гидромеханики на лопастях и кромках машущего плавника сводится к проектному синтезу для построения жесткого машущего крыла в профилированной насадке; гибкого машущего крыла в свободном потоке; раскачивающего плавника с локальным и протяженным креплением на корпусе корабля; а также весьма актуального активного стабилизатора килевой и бортовой качки корабля – штормового аварийного движителя.
Моим друзьям-волжанам,
Ольге Солдатовой.
Весьма актуально рассмотрение нестационарных процессов в гидромеханике гибких лопастей плавниковых движителей и машущих крыльев с управляемой геометрией несущих поверхностей, где инженерных изысканиях востребуются эвристический анализ зарождения и проектный синтез поступательных и вихревых потоков с непрерывно изменяющимися знакопеременными нагрузками. Несущие поверхности машущих крыльев, плавниковые движители и активные стабилизаторы обладают наилучшей эффективностью в условиях управляемого взаимодействия вихревых и струйных потоков, с искусственно оптимизированной и полезной взаимокомпенсацией энергии в моменты зарождения спутной пелены, индуктивных вихрей и струйных течений на машущем плавнике и вблизи судовой обшивки корабля. Изначально оговорим возможность оптимизации кинематики машущего крыла-плавника в свободном безграничном потоке только в случае динамически изменяемой в пространстве геометрии, профиля и контуров его поверхности, а в случае жесткого плавника рассматривается его работа в специально профилированном коробе-насадке.
Гидромеханика медленных скоростей отчасти рассогласуется с традиционной интерпретацией физического явления в терминах распределения сил и гидродинамических давлений по жесткой несущей поверхности, и особо в случае динамически изгибающихся крыльев-плавников. В нестационарных потоках обтекание крыла связывается весьма существенной перестройкой всей картины течений, значительными перемещениями критических узлов под крылом, а также: 1) – с интенсивным и взаимно синхронным влиянием спутной пелены с новообразующейся цепью свободных разгонных вихрей; 2) – с образованием знакопеременной индуктивной вихревой трубки на концевой кромке – крайнем луче плавника заведомо короткого удлинения; 3) – с возникновением взаимодействия крыла с разрывами потоков и вихревыми поверхностями на границах струйных течений вблизи узких угловых полостей, если в работе движителя предусматривается «ударное» воздействие лопасти плавника на неподвижную ограничивающую поверхность внутри короба-насадки или непосредственно близи судовой обшивки.
В гидромеханике машущего крыла востребуется несколько расширенная интерпретация традиционного понятия «угла атаки», для которого в буксирном режиме плавник видится в движении «поперек потока». В гидромеханике движителей оптимальнее воспользоваться определением для трехмерного вектора «угла скольжения», характеризующего наклон лопасти плавника в локальной подобласти набегающего потока. Вектор угла скольжения привязывается к элементарной площадке на гибкой лопасти плавника, находящегося под воздействием набегающего потока в условно малом прилегающем объеме, и отсчитывается по касательным к криволинейным траекториям течений в условно неподвижной абсолютной системе координат.
Каждую из трех вышеперечисленных систем вихреобразования будем условно связывать: 1) – на задней кромке – спутная пелена и цепь сходящих вихрей; 2) – на концевой кромке – устойчивый вихревая трубка, зависящая от величины скорости перемещения лопасти; 3) – поверхности струных вихревых разрыв, образующихся при приближении и удалении лопасти крыла к неподвижным ограничивающим поверхностям.
Рассматривая основы конструкции, кинематику и гидромеханику плавникового движителя, ограничимся этими векторными и вихревыми соотношениями.
Нестационарная гидромеханика плавникового движителя.
Машущее крыло-плавник – синтез процессов и явлений гидромеханики.
1) спутная пелена и цепь спутных (разгонных) вихрей машущего крыла;
2) индуктивный срыв потока и вихревая трубка крыла малого удлинения;
3) сдвиговые разрывы и вихревые поверхности на струйных границах;
4) угол скольжения крыла по набегающему потоку в малом смежном объеме.
Скругленная передняя кромка крыла – краевой луч плавника.
Задняя кромка крыла.
Концевая кромка крыла.
Среднее положение крыла-плавника
Крайнее положение крыла-плавника:
1) с гибким машущим крылом в свободном потоке;
2) с жестким крылом в коробе-насадке;
3) с локальной или протяженной осью раскачивания вдоль корпуса.
Короб – насадка.
Гибкий плавник в свободном потоке.
Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель.
В отличие от неподвижного крыла или винтового движителя, подъемная сила и тяговое усилие машущего плавника создаются не простым поддержанием постоянной интенсивности спутной вихревой пелены, а циклическим зарождением и оптимизацией взаимодействия трех вихревых потоков: 1 – спутной пелены, сходящей с задней кромки крыла и перерождающейся в цепь свободных вихрей знакопеременной интенсивности; 2 – срыва потока на конце крыла малого удлинения с образованием интенсивной вихревой трубки, также стремящейся к освобождению от близкого влияния машущего плавника; 3 – струйных разрывов в вихревых слоях ускоренных течений, возникающих под влиянием клиновидных полостей между лопастями плавника и неподвижными ограничивающими поверхностями, где в динамике возникает засасывание и быстрый реактивный выброс жидкости.
Машущее крыло-плавник образуется гибко-упругой лопастью или жестким машущим крылом, простирающихся по потоку жидкости от передней до задней кромки, а на удалении от корня машущего крыла ограничивающегося концевой кромкой со специально оптимизированным изгибом во внешнюю сторону.
Общая настройка локальных углов скольжения машущего крыла выполняется из условия относительно равномерного распределения сил и давлений по размаху крыла, с гладким и неразрывным распределеним сдвиговых напряжений по хордам сечений на поверхности гибкого плавникового движителя.
Гибкое крыло-плавник с управляемой геометрией машущей лопасти в свободном потоке может представляться последовательностью лучей – жестких ребер с общей настройкой активной поверхности на движение по волновым – синусоидальным траекториям с управляемым скольжением. Для плавника в свободном потоке особо оптимизируется изгиб краевого луча (жесткого ребра) на объединенной передне-концевой кромке, где неизбежные индуктивные срывы потока должны настраиваться на динамическую взаимокомпенсацию с новообразующейся спутной пеленой на задней кромке плавника, после слияния которых ожидается взаимопогашение свободных спутных со знакопеременными индуктивными вихрями.
Если корень машущего плавника устанавливается неподвижно на корпусе корабля, то полноценные маховые движения ограничиваются раскачиваниями с чисто кинематическим и неблагоприятным закручиванием набегающего потока на лопасти плавника, совмещающегося со спутной пеленой на лопасти и задней кромке плавника. Для частичного выравнивания потока в фазе маховых движений, на удалении от судовой обшивки, возможно некоторое усиление изгиба краевого луча для индуктивного вихреобразования на передне-концевой кромке, и что неосуществимо в фазе движения вблизи ограничивающей поверхности. Вблизи корпуса гибкий плавник может расправляться, и в момент приближения к ограничивающей поверхности выбрасывать ускоренную реактивную струю из схлопывающейся клиновидной полости. В следующий момент лопасть отгибается от обшивки корпуса и затягивает быстрый поток жидкости в узкую расширяющуюся полость под плавником. Реактивная струя из под плавника способна догнать спутный вихрь, не ослабляемый вблизи корпуса индуктивным вихреобразованием, и затем погасить его воздействием вихревого слоя на границе быстрой струи.
В маховых движения жесткого крыла, и особо в случае пассивного упругого прогиба несущей поверхности, как показывают опытовые эксперименты, спутный и индуктивные вихри приводят к сложению негативных эффектов, вплоть до неприемлемого снижения эффективности машущего плавника в качестве движителя. Оптимальная работа жесткого крыла возможна при использовании специально профилированного ограничивающего короба-насадки, боковые стенки которого предотвращают индуктивное вихреобразование на концевых кромках крыла. Исключение индуктивного вихреобразования способствует естественной трансформации спутной пелены в цепь свободных разгонные вихрей в следе машущего плавника. Техническое решение видится в подборе дистанции между жестким крылом и ограничивающей поверхностью в крайних положениях маховых движений внутри короба-насадки. В узких угловидных полостях возникают ускоренные струйные потоки, которые догоняют и трансформируют спутные вихри в полезные поступательные потоки за движителем.
По аналогии выполняется анализ собственно явлений и процессов гидромеханики в отношении различных принципов построения плавниковых движителей, активных стабилизаторов качки и других машущих крыльевых систем.
1) пелена и цепь спутных вихрей машущего крыла образуются в результате нестационарных маховых движений плавника. Неподвижное крыло в набегающем потоке только поддерживает присоединенный вихрь, определяющий подъёмную силу крыла. Любое изменение скорости или угла атаки приводит к изменению интенсивности присоединенного вихря, и, как следствие, образованию спутной пелены, сворачивающейся в свободные спутные вихри в масштабе времени изменения гидродинамических процессов на крыле. В случае машущего плавника, на каждой фазе в среднем положении лопасти в режиме крыла образуется вихревая пелена, циклически перерождающаяся в свободные спутные вихри знакопеременной интенсивности. Собственно сила тяги машущего плавника соизмеряется с интенсивностью создаваемых цепочек спутных вихрей, а их свободный отрыв от лопастей машущего движителя является расточительным рассеянием энергии в ущерб эффективности движителя.
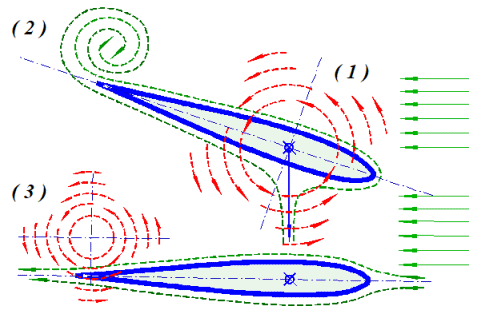
Рис. 1. Присоединенный (1 – несущий), спутный (2 – разгонный) и сходящий (3 – сгонный) вихревые потоки в маховых движениях лопасти плавника в среднем (сверху) и крайнем (снизу) положениях.
Взаимокомпенсация спутных вихрей может быть выполнена в процессе непрерывного слияния спутной пелены с индуктивными вихреобразованием на крайнем луче – передне-концевой кромки в случае гибкого плавника, в моменты полного распрямления лопасти в среднем положении и, соответственно, при прохождении фазы максимальной скорости компенсационного изгиба несущей поверхности плавника, и таким образов предотвращающей индуктивный срыв потока с концевой кромки машущего крыла.
В качестве варианта ослабления спутных вихрей может стать создание струйных течений в крайних положениях плавника вблизи судовой обшивки или ограничивающей поверхности короба-насадки. В крайних положениях машущее крыло имеет минимальную скорость поступательного движения и быстро поворачивается вокруг сбалансированной поперечной оси, отчего создается выброс реактивной струи с последующим ускоренным затягиванием струйного потока в новообразующуюся полость под крылом, вихревые слои на границах которых вступают в активное взаимодействие со спутной пеленой и зарождающимися спутными и сгонными перечными вихрями, что усиливает полезный импульс тяги за счет раскручивания и гашения интенсивности вихреобразования в следе за движителем.
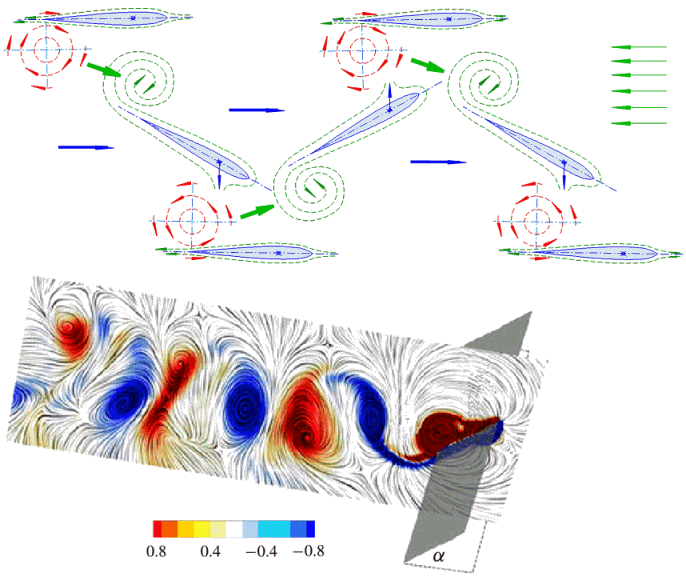
Рис. 2. Присоединенный вихрь в крайних положениях сходит с лопасти машущего крыла с завихрённостью в направлении спутного (разгонного) вихря в последующей фазе в режиме крыла [11 - Wang, S. 2019, нижний рисунок], и потому, без введения процессов оптимизирующей гидромеханики эффективность жесткого машущего крыла в открытом потоке снижается до неприемлемо низкого уровня.
2) индуктивный вихрь на концевых кромках образуется при поступательном движении лопасти плавника с углом скольжения (локальным углом атаки), и, по сути, является следствием возникновения сдвиговых напряжений на жестком крыле малого удлинения. На концевой кромке удлиненного крыла порождается срыв потока, сворачивающийся в трубку свободного индуктивного вихря с необратимой утечкой энергии на возбуждение окружающей среды.
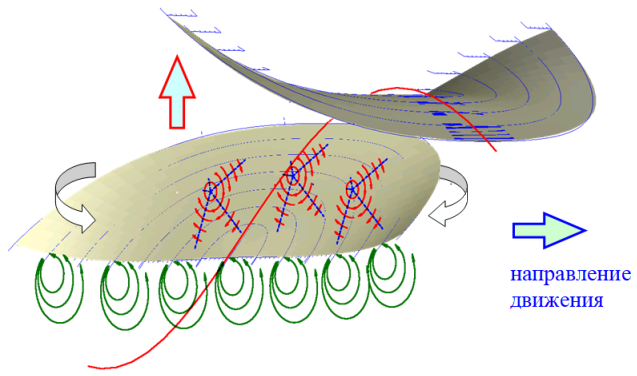
Рис. 3. На первом взмахе плавника в среднем положении в режиме крыла возникает спутных вихрь, способный освободится от влияния движителя. Индуктивные срывы потока, проходя через скругленный крайний луч – передне-концевую кромку плавника, действуют на усиление несущего присоединенного вихря, отчасти способствуя повышению качества плавника, как движителя. В крайнем положении гибкий плавник становится седловатым с опережающим взмахом концевых частей крыла для прекомпенсации зарождающегося вихреобразования на следующем этапе в режиме крыла.
Использование плавного изгиба крайнего луча плавника – передней кромки крыла, трансформирующегося в специально оптимизированную геометрию объединенного передне-концевого ребра с острым углом концевого сопряжения с задней кромкой гибкого крыла, и, таким образом, создающих условия для распределенного схода индуктивного вихря по всему размаху машущего крыла, затем смещающегося набегающим потоком в зону зарождения спутной вихревой пелены на задней кромке крыла, где в кинематике маховых движениях лопасти плавника происходит слияние вихревых потоков разнонаправленной интенсивности, с их объединяющим распрямлением в полезный поступательный и безвихревой поток за машущим движителем.
Интенсивность индуктивного вихреобразования на жестком крыле усиливается с удалением от корня к концевой кромке крыла. Выравнивание такой завихренности может выполняться путем динамического изгиба концевого фрагмента лопасти навстречу маховому движению, при этом в среднем положении плавник должен полностью расправляться и обретает максимальную скорость изгиба, с последующим обретением максимальной кривизны и изменением знака скорости в крайних положениях маховых движений плавника.
Критерием оптимизации кинематики и перестройки геометрии плавника будет полная взаимокомпенсация спутных и индуктивных вихрей в среднем положении, в фазе крыла, с последующим разделенным накоплением интенсивности противовихрей в его крайних положениях, в фазе ротора, условно достаточных для повторной взаимокомпенсации новообразуемых спутных и индуктивных вихрей в процессе возвращения плавника в среднее расправленное положение.
3) образование ускоренных струйных потоков происходит в угловидных полостях в маховых фазах в крайних положениях жесткого машущего крыла вблизи ограничивающих поверхностей внутри короба-насадки, либо, в случае качающегося плавника с зафиксированным корнем, аналогичные струйные течения и реактивные выбросы жидкости создаются в моменты сближения-расхождения лопасти плавника с поверхностью судовой обшивки.
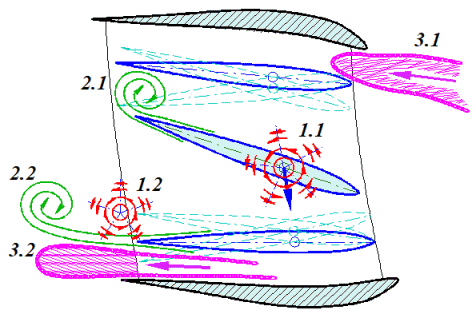
Рис. 4. Кинематическая схема, спутное и струйное вихреобразование на машущем плавнике в жестком коробе-насадке. Ускоряемые струйные течения: 3.1 и 3.2, возникающие в крайних положениях машущего крыла вблизи ограничивающих поверхностей короба-насадки, распрямляют струйные потоки с образованием полезного поступательного течения за движителем в целом.
На рисунке 4 приведены зарождающиеся вихревые потоки, которые при оптимизации гидромеханики машущего движителя должны взаимно погашаться и трансформироваться в поступательный поток за машущим движителем в специально профилированной насадке: 1.1 – несущий вихрь в режиме крыла; 1.2 – сгонный вихрь зарождается при потере скольжения крыла; 2.1 – спутный вихрь зарождается из вихревой пелены, компенсирующей развитие несущего вихря на крыле; 2.2 – спутный вихрь становится энергетической утечкой, если он не вовлекается в компенсирующее воздействие сгонного вихря при торможении крыла; 3.1 – в клиновидную область, в крайнем положении крыла и ограничивающей поверхности, втягивается ускоренный струйный поток жидкости, который способтвует развитию и усилению несущего вихря 1.1; 3.2 – выброс ускоренной реактивной струи компенсирует остатки завихренности сгонного вихря.
Узкие струйные потоки в свободном движении не прижимаются к судовой обшивке, где в результате подтормаживания повышается относительное давление, и потому вихревой разрыв на внешней границе активной струи неизбежно вступает во взаимодействие с высвобождаемыми присоединенными – сгонными вихревыми структурами на поверхности машущего крыла. Реактивный выброс воды из полости под плавником, так же как и поток за машущим движителем, в целом, может срываться на задней кромке ограничивающей поверхности короба-насадки. Предотвращение отрывов и снижение потерь на движителе обеспечивается выравниванием внутренних и внешних потоков, для чего внутренние полости и внешние поверхности короба-насадки специально профилируются (рис. 4) под номинальную скорость хода корабля.
4) угол скольжения – связанный трехмерный вектор (в авиации – угол дрейфа самолета) устанавливается по хорде или по касательным к локальным фрагментам лопасти крыла-плавника относительно активно воздействующего внешнего потока, что позволяет оперировать взаимозависимыми векторными величинами при анализе процессов в гидромеханике движителя, в то время как видимые углы атаки по направлению движения крыла оцениваются скорее поперечными, как и углы по ходу корабля не отвечают реальным распределениям потоков в нестационарной гидромеханике относительных перемещений гибкой поверхности медленно машущего плавника.
Как и в гидромеханике под углом скольжения принимаются отсчеты наклонов локальных фрагментов крыла-плавника относительно текущего или вызванного этим же крылом потока жидкости.
Передняя кромка крыла – имеет утолщение с гладким эллиптическим скруглением, что в случае нестационарных маховых движений особо существенно для беспрепятственного смещения критической линии нулевых скоростей и максимальных гидродинамических давлений, способной удаляться от передней кромки глубоко под крыло в случаях больших углов скольжения (углов атаки), либо переходить на его обратную сторону. При этом крыло обретает необходимые утолщение и объёмность.
В случае с изогнутой или стреловидной передней кромкой, в частности, когда образуется передний луч гибкого плавника, индуктивный срыв потока усиливает присоединенный вихрь и отчасти улучшает подъемную силу крыла.
Гидромеханика машущего крыла нормализуется только по достижении определенной скорости хода, при достижении безотрывных потоков по всем поверхностям крыла и в пелене спутного вихревого слоя. В буксировочных или реверсных режимах работы движителя, когда углы скольжения соизмеряются с величинами углов атаки поперечно низкоскоростному потоку, на поверхности крыла образуются разрывные течения и свободные вихревые потоки, существенно снижающие эффективность его как движителя.
Излишнее заострение или недостаточное скругление передней кромки крайне негативно проявляется во всех режимах работы плавникового движителя, что проявляется разрывами течений, вихреобразованием и кавитацией в передней части плавника, находящейся под гидродинамическим разрежением. Негативный эффект острой передней кромки неизбежно проявляется в реверсном режиме работы, и его пониженную работоспособность необходимо учитывать в практике реального судовождения.
Задняя кромка крыла имеет заострение для выравнивания ускоренного потока по выпуклой верхней поверхности крыла, и его замедленной – нижней, которая в несимметричном случае может быть плоской или вогнутой. На задней кромке плавника образуется пелена спутного вихреобразования, сворачивающаяся затем в свободный поперечный спутный вихрь, интенсивность которого соизмеряется с накоплением завихренности на машущем крыле и последующим возникновением полезного тягового усилия.
В крайних положения углы скольжения жесткого крыла сводятся к нулю, прекращается действие подъемной силы и присоединенного – несущего вихря: затем происходит смена фазы маховых движений с сохранением заданного направления тяги. В этот момент, вслед за спутным вихрем с крыла сходит сгонный вихрь, встраивающийся следующим звеном знакопеременной вихревой цепочки.
Оптимизация гидромеханики маховых движения плавника сводится к минимизации интенсивности свободных спутных и сгонных вихрей. В случае гибкого крыла минимизация явных энергетических потерь возможна с помощью противопоставления и взаимокомпенсации свободных вихрей у задней кромки с индуктивным вихреобразованием на концевой кромке машущего крыла: 1) путём закручивания потока жидкости вслед за динамическим изгибом концевых фрагментов лопасти плавника; 2) с помощью образования струйных потоков в узких полостях в крайних положениях плавника вблизи обшивки корпуса, или в соприкосновениях с другими ограничивающими поверхностями, например внутри короба-насадки.
В случае жесткого или пассивно-упругого машущего крыла со свободными концевыми кромками происходит негативное сложение индуктивных срывов потока и вихреобразованием в нестационарной спутной пелене, отчего крыло начинает хлюпать кавитационными и вихревыми срывами, отчего тяга движителя существенно уменьшается. Падение эффективности движителя проявляется при излишнем или недостаточном приближении плавника к ограничивающим поверхностям, так как вместо полезного усиления струйных потоков может произойти вихревое запирание встречного течения, с соответствующими потерями эффективности от подтормаживания под действием ударных или кавитационных нагрузок, снижающих упор силового импульса в момент трансформации свободных вихрей в поступательные потоки в следе за движителем.
Концевая кромка крыла ограничивает его удлинение, что способствует срыву потока и образованию трубки индуктивного гидродинамического вихря, отчего происходит существенная потеря энергии в варианте жесткого неподвижного крыла. Негативное действие индуктивного вихря на жестком крыле может быть частично ослаблено использованием концевых шайб, или минимизировано установкой машущего крыла в специально профилированный короб, что особо не влияет на генерацию поперечных спутных вихрей на каждом взмахе крыла-плавника.
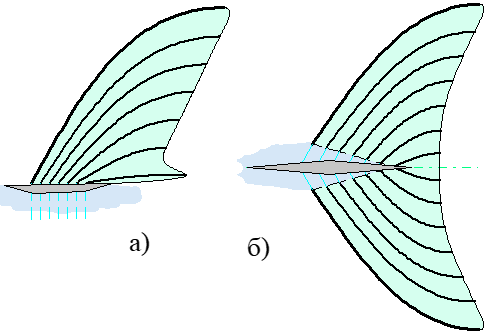
Рис. 5. Лучи бокового (а) и хвостового (б) плавников на задней кромке крыла выравниваются в направлении спутного потока. Переднее утолщенное ребро – крайний луч плавника плавно скругляется на касательную к условно концевой кромке крыла, сразу же обрывающейся сломом к задней кромке. Все лучи вблизи задней кромки становятся совсем тонкими, свидетельствующими о недопустимости срывов потока, в том числе в касательной концевой точке, где спутная пелена взаимокомпенсируется индуктивным срывом потока во всех фазах маховых движений плавника.
Оптимальным решением является сопряжение передней и концевой кромок крыла с построением плавного изгиба (рис. 5), по аналогии с передним лучом плавника или крыла птицы, завершающегося острым углом в точке схождения с задней кромкой машущей лопасти, то есть без обратного загиба от направления основного потока. В этом случае индуктивный срыв и вихреобразование работают на полезное усиление интенсивности несущего вихря; так как протяженность вихревой трубки соответствует масштабу спутной пелены на задней кромке крыла, то их взаимокомпенсация также полезно сказывается на качестве и подъемной силе крыла.
Оставшееся после фазы расправленного крыла вихреобразование вовлекается в процессы трехмерного воссоединения вихревых структур в фазе ротора в крайнем положении сильно изогнутой седлообразной лопасти плавника, в результате чего обеспечивается прекомпенсация индуктивных вихрей с запаздывающей по скольжению спутной пелены, вплоть до нового выхода в режим крыла на следующей полуфазе.
Среднее положение крыла-плавника отмечается распрямлением лопасти для движения в режима крыла с максимальным углом скольжения и наибольшей интенсивностью спутной пелены на задней кромке крыла, и при этом полностью завершено формирование свободного поперечного спутного вихря за движителем.
В среднем положении гибкое крыло полностью расправляется, и имеет максимальную скорость изгиба концевыми фрагментами лопасти навстречу потоку, что требуется как для гашения возникающего индуктивного вихреобразования с последующим установлением противовихря для спутной пелены в крайнем положении плавника.
При работе жесткого машущего крыла в коробе-насадке, индуктивное вихреобразование предотвращается с помощью непротекаемого касания со скольжением концевой кромки по гладкой поверхности боковых стенок, что делает неизбежным развитие и отрыв свободных спутных вихрей от задней кромке крыла.
Без короба-насадки эффективность жесткого машущего крыла становиться неприемлемо низкой. Совсем недопустим гибкий пассивный изгиб концевых фрагментов лопасти крыла по встречному потоку, в этом случае складываются и усиливаются все негативные процессы гидромеханики плавника.
Крайнее положение крыла-плавника характеризуется отсутствием угла атаки крыла по ходу движителя; и падением до нуля скорости маховых движений лопасти плавника. В свободном потоке лопасть гибкого плавника обретает наибольший изгиб по размаху и с обратным знаком по хорде, при этом концевые фрагменты в маховом движении опережают среднюю или корневую часть лопасти. Раскачивающийся у неподвижного корня гибкий плавник, так же как и жесткое машущее крыло в коробе-насадке, в крайних положениях последовательно создают сужающиеся угловидные полости для выброса реактивных струй воды, с последующим расхождением и ускоренным втягиванием набегающего потока под лопасть плавника вблизи ограничивающей поверхности. На границах таких струйных течений возникают вихревые разрывы, способные к полезному взаимодействию с зарождающимися несущими вихревыми структурами на машущем крыле, с последующей взаимокомпенсацией спутных и сгонных вихревых систем на задней кромке плавника,
Синтез поступательных и вихревых потоков в гидромеханике машущих движителей оптимизируется по установлению гладких и равномерных распределений толкающих усилий на плавнике, следствием которого становится выравнивание поступательного потока в следе за движителем. Действие лопасти плавника в крайнем положении существенно отличается для трех различных типов машущих движителей: 1) с гибким машущим крылом-плавником в свободном потоке, оптимизирующий гидромеханику крыла с помощью управляемых изгибов лопасти как размаху, так и по хордам плавника; 2) с жестким крылом в профилированном коробе-насадке, где гашение индуктивных вихрей происходит на боковых стенках – шайбах, а свободные спутные и сгонные вихревые системы компенсируются реактивными струями, образующимися вблизи ограничивающих поверхностей в крайних положениях плавника; 3) в виде раскачивающихся плавников с шарнирным или осевым протяженным креплением ребер гибкого плавника на обшивке корпуса, где задействуются оба вышеуказанных гидромеханических процесса в крайних положениях лопасти на отделении и вблизи бортовой обшивки корабля:
1) Условно называя трансформацию поверхности гибкого плавника в крайних положениях «режимом или фазой ротора» [1 – «Корабль с плавниковым движителем»], отмечаем искусственное закручивание потока на поверхности лопасти плавника с выраженной седловатостью, что способствует гидродинамической взаимокомпенсации (с обратным раскручиванием) спутных и сгонных вихрей на задней кромке; с привнесением завихренности на усиление несущего (присоединенного) вихря в последующей фазе расправления лопасти в среднем положении в «режиме крыла». Специально оптимизированный изгиб крайнего луча плавника – передне-концевой кромки машущего крыла, служит равномерному распределению интенсивности индуктивный срывов и вихреобразования на всем протяжении переднего жесткого скругленного ребра крыла, и тем способствуют усиленному развитию несущего (присоединенного) вихря в моменты расправления лопасти плавника в режиме крыла, соответственно подминающего под себя и ослабляющего становление спутной пелены и развития свободного спутного вихря.
Таким образом, в крайних положениях гибкого крыла в режиме «ротора» формируются вихревые структуры, равномерно распределяющие тяговые нагрузки во времени по всей поверхности несущей лопасти крыла-плавника, результатом взаимодействия которые становится ускоренный поступательный поток в следе за движителем;
2) На жестком крыле в профилированном коробе-насадке не происходит индуктивных срывов и не образуются вихревые трубки на концевых кромках машущего крыла. Спутная пелена без потерь срывается с задней кромки крыла и формирует свободные спутные вихри, интенсивность которых еще и усиливается сгонными вихрями (рис. 2) в моменты потери тяговых углов скольжения в крайних положениях жесткого машущего крыла.
Динамически оптимизируемым техническим решением может быть управляемое приближение лопасти крыла к ограничивающим поверхностям внутри специально профилированного короба-насадки, где будут при сближении образуются клиновидные полости для выбросов высокоскоростных реактивных струй, с последующим затягиванием ускоренных струйных потоков под крыло в следующие фазы расширения полости.
Ускоренный реактивный выброс жидкости из клиновидной полости может догонять и вступать во взаимодействие со сгонными вихрями (рис. 4), сходящими с крыла в моменты потери углов скольжения (углов атаки) в крайних положениях жесткого машущего крыла. Критерием оптимизации гидромеханики жесткого крыла в крайних положениях может служить результирующий поступательный и безвихревой поток в следе за движителем.
В моменты удаления жесткого крыла от ограничивающей поверхности происходит формирование ускоренного струйного потока, засасываемого под разворачивающееся жесткое крыло. Вызванное высокоскоростное течение накладывается на ускоренный поток на поверхности крыла с пониженным гидродинамическим давлением, тем самым завышая интенсивность несущего (присоединенного) вихря на крыле в целом, отчего также происходит некоторое подавление напряжения в спутной пелене, вплоть до исключения возможности образования и срыва свободных спутных вихрей с задней кромки крыла.
Ускоренные реактивные выбросы и струйные затягивания жидкости вполне пор интенсивности могут превышать требуемые оптимизационные критерии, связанные с формированием безвихревого поступательного потока в следе за машущим движителем. В таком случае, в следе за машущим крылом струйные выбросы пересилят сходящие с крыла сгонные вихри, что внешне будет проявляться как бы восстановлением спутных вихрей, характерных для маховых движений крыла в свободном потоке.
Величина клиновидной полости может регулироваться динамически по оценкам понижения давления в моменты расхождения жесткого крыла с ограничивающей поверхностью. В верхних горизонтах в крайних положениях плавника вполне возможно возникновение отрицательного давления и кавитационного вскипания жидкости, что формализуется к условиям максимальной мощности движителя, в предположении, конечно, что в фазе сближения крыла с ограничивающей поверхностью не сформируются избыточные ударные нагрузки за счет чрезмерного ускорения потока в реактивной струе за движителем.
Жесткое крыло в профилированной насадке создает непрерывную тягу во всех фазах движения от режима крыла до струйных импульсов в крайних положениях. Важно также заметить необходимость значительного скругления передней кромки и соответствующего утолщения симметричного крыла-плавника, работающего в знакопеременных углах скольжения, и в том числе с глубоким затягиванием передней критической зоны под крыло в буксирных режимах с большим тяговым усилием и малой скоростью хода судна.
3) Если плавниковый движитель раскачивается на неподвижной продольной оси или в шарнире на корпусе корабля, то собственное вращение лопасти в фазе крыла не способствует ослаблению интенсивности индуктивного вихря на концевой кромке. Вблизи корпуса плавник не может обретать седловатую форму, соответственно, снижается эффект опережающего перемещения крайнего луча – передне-концевой кромки, в режиме крыла полное распрямление лопасти также становится нерациональным; отчего в крайних положениях на удалении от корпуса не реализуется режим ротора.
Режим маховых движений качающегося плавника объединяет принципы гидромеханики гибкого машущего крыла на удалении от судовой обшивки – подобно крайнему положению в маховом движении плавника в открытом потоке; а также плоского жесткого крыла в моменты приближения к корпусу – формируются реактивные выбросы и ускоренное затягивание потоков воды в зауженные клиновидные полости между крылом и ограничивающей поверхностью борта корабля.
Качающийся плавниковый движитель может служить активным стабилизатором качки, в том числе действующим без хода корабля, а также использоваться в качестве вспомогательного движителя относительно невысокой мощности. В отличие от маршевых движителей, качающееся крылья могут длительное время держаться прижатыми к корпусу; или расправляться по нормали к обшивке в качестве бортовых стабилизаторов, и лишь по необходимости выполнять раздельные маховые движения для импульсных толчков в маневрировании корабля.
Специально профилированный короб – насадка служит для достижения оптимальной гидромеханики движителя – жесткого машущего крыла. Боковые поверхности короба-насадки прилегают к концевым кромкам крыла, что фактически исключает срыв потока с индуктивным вихреобразованием. Вторая пара поверхностей ограничивает размах движений плавника, создавая условия для ударного выброса реактивной струи с последующим ускоренным засасыванием потока жидкости в узкую полость, раскрывающуюся в отвороте за отходящим жестким крылом.
В отличие от крыла в открытом потоке, компенсация освобождающихся на задней кромке спутных и сгонных вихревых структур, цепочки которых формируются в крайних положениях плавника, теперь выполняется с помощью ускоренных струйных потоков в клиновидных узких полостях, образуемых сближением крыла с ограничивающими поверхностями в специально профилированном коробе-насадке.
При отсутствии ограничивающих поверхностей получается как бы двумерная модель машущего крыла, в которой ничто не может препятствовать образованию спутной пелены, скручивающейся в свободные спутные вихри, циклически сменяемые сходящими вихревыми структурами обратной интенсивности, которые в среднем положении крыла создавали подъемную силу и тягу крыла. При задействовании только боковых стенок, опытовая модель с жестким машущим крылом показывала значительно худшую эффективность во всех тяговых режимах, а еще без боковых стенок работа такого движителя вблизи свободной поверхности воды признавалась и вовсе неприемлемой.
Весьма сложная конструкция жесткого плавника в коробе-насадке предопределяет возникновение избыточных напряжений и больших градиентов течений на линиях сопряжения и скольжения жестких поверхностей. Так, в случае срыва потока на передней кромке нарушается стабильная работа движителя, на крыле порождаются вторичные вихревые структуры высокой интенсивности, которые значительно снижают тяговое усилие на движителе в целом. Возникновение таких срывов предотвращается путем оптимизации радиуса скругления передней кромки и утолщения тела крыла. В то же время, такое нарушение осевой симметрии ухудшает характеристики движителя на заднем ходу.
Величина заужения полости между крылом и ограничивающей поверхностью короба-насадки может регулироваться динамически за счет изменения размаха перемещений плавника, что может востребоваться в различных буксировочных режимах. Экспериментально отмечается также, что любое отклонение от оптимальной гидромеханики жесткого крыла сказывается возникновением колебаний кормовой части корпуса корабля в темпе маховых движений крыла.
В нормальном гидродинамическом режиме выброс реактивной струи раскручивает сгонный вихрь, сходящий с крыла при уменьшении тягового угла скольжения. Последующее ускоренное затягивание потока жидкости в раскрывающуюся полость, при удалении крыла от ограничивающей поверхности, усиливает несущий (присоединенный) вихрь на машущем крыле, тем самым ослабляя развитие спутной пелены, с последующим предотвращением отрыва свободного спутного вихря.
При этом разрежение на поверхности крыла со стороны узкой полости может достигать отрицательных давлений, после чего происходит кавитационное вскипание жидкости с выведением движителя из стабильного режима. По признаку минимального давления возможно регулирование общей мощности движителя, что также предотвратит гидродинамические удары в моменты выброса реактивной струи при схождении крыла с ограничивающей поверхностью.
Существенной особенностью короба-насадки является специальное профилирование всех четырех ограничивающих поверхностей, что требуется для выравнивания потоков внутри и вовне насадки для минимизации вихревой пелены и безусловно безразрывного стекания с концевых кромок на стенках насадки.
Относительно медленные движения лопастей плавниковых движителей и активных стабилизаторов ориентации для пространственной морской техники, востребуют множество эмпирических решений с элементами эвристики для обоснования очевидных явлений и процессов гидромеханики, широко распространенных в живой природе. В практической гидромеханике крыла рассматриваются постулат Жуковского о стекании с задней кромке крыла, законы Бернулли о перераспределении давлений при взаимном влиянии скоростей течений, и формальные аксиомы о суперпозиции вихревых потоков и поступательных течений в идеальной невязкой и несжимаемой жидкости.
Все инженерные решения не будут связываться с геометрическими размерами технических объектов, если в гидромеханику не вовлекается реология жидкости, тем не менее будем полагать возможным зарождение движения жидкости в рамках вышеизложенных формальных аксиом, постулатов и законов гидромеханики.
В проектировании конкретных механизмов, в качестве целевых пространственных функций и векторно-тензорных распределений врполне приемлема ориентация на принципы Н. Е. Жуковского о гладком, и по возможности – равномерном распределении гидромеханической энергии и силовых напряжений по всей поверхности лопасти крыла, дополняемые поиском экспериментальных и аналитических решений для устранения импульсных тяговых усилий во времени, что формально сводится к установлению взаимокомпенсации трех вихревых потоков в следе за машущим движителем: индуктивных вихревых срывов на концевых кромках крыла малого удлинения; спутной пелены и свободных поперечных вихрей, взаимодействующих со сходящими присоединенных вихрей на задней кромке машущего крыла; а также струйных потоков в клиновидных полостях между лопастью крыла и обшивкой корабля, образующих затягивание и реактивные выбросы жидкости с последующим раскручиванием спутных и сходящих вихрей в поступательные потоки за плавниковым движителем.
Последовательно рассмотрим различные технические решения и варианты построения гибких и жестких, машущих и раскачивающихся крыльевых систем в морской технике.
Жесткое крыло представляется простейшей реализацией машущего плавника, по крайне мере это справедливо для опытовых экспериментов с самоходными моделями. Гидромеханика такого движителя может строиться на практически полном исключении индуктивных срывов потока и вихреобразования на концевых кромках машущего крыла. Освобождающиеся при этом присоединенные вихри и спутная пелена приводятся во взаимодействие с ускоренными поступательными потоками жидкости, возникающими в угловидных полостях между крылом и ограничивающими поверхностями профилированной насадки в моменты схождения и расхождения с плавником в его крайних положениях. Формально, в отличие от машущего крыла в свободном потоке, на жестком плавнике непротиворечивое проектирование акцентируется на нестационарных процессах зарождения и взаимокомпенсации спутных вихрей во взаимодействии с ускоренными поступательными потоками, также проявляющихся поверхностями вихревых разрывов на границах разделения струйных течений.
Безусловными техническими проблемами жесткого плавника остаются чрезмерно большие знакопеременные нагрузки на приводах – шатунах; трудности скользящего притирания концевых кромок крыла боковыми поверхностями короба-насадки; и как следствие опасности повреждения крыла и его механизмов при касании грунта или попадании под крыло посторонних предметов.
Крайне важно отметить, что любые варианты кинематики или особой формы жесткого машущего крыла в свободном потоке не приводят к сколь-нибудь приемлемым инженерным решениям, гидромеханика движителя складывается только в случае оптимизации геометрических соотношений и специального профилирования жесткого крыла в едином комплексе с построением боковых и ограничивающих поверхностей короба-насадки.
Изначально опытовая модель жесткого плавникового движителя создавалась в качестве двумерного упрощения полноценного гибкого машущего крыла-плавника [1], где короб насадка боковыми стенками обеспечивал требуемую двумерность. Однако, экспериментальные изыскания сразу же показали чрезвычайную необходимость вовлечения в гидромеханику плавника ограничивающих поверхностей короба насадки, и что, соответственно подтверждало принципиальную невозможность создания эффективного махового движителя в двумерном естественном, так же как и в математическом пространстве. Оценочно: эффективность и тяговое усилие жесткого плавника в коробе-насадке повышается на порядок, или иначе – жесткое крыло малого удлинения в свободном неограниченном потоке практически неработоспособно. В свободном потоке может работать лишь гибкое машущее крыло, с ожидаемо большей эффективностью в сравнении с жестким крылом в насадке. Другие варианты движителей с управляемой геометрией лопасти в свободном потоке будут рассматриваться в следующих разделах данной работы.
Жесткое машущее крыло со струйно-реактивным сглаживанием спутной пелены и сходящих присоединенных вихрей, служит маршевым движителем корабля. В рабочем режиме крыло выполняет маховые движения с образованием синусоидальных траекторий со скольжением (локальным углом атаки) относительно хорды несущей поверхности плавника, – отличающееся тем, что, одиночный плавник, или пара симметрично действующих плавниковых движителей, помещаются в специально профилированный оконтуривающий короб – насадку, предотвращающий образование концевых индуктивных вихрей, и обеспечивающий гидродинамическое раскручивание спутных вихрей во взаимодействии с ускоренными реактивными выбросами жидкости в крайних положениях машущего крыла вблизи ограничивающих поверхностей, а именно:
1 – концевые кромки крыла имеют предельно малый зазор с боковыми поверхностями короба – насадки, действующими в качестве непроницаемых концевых шайб для исключения потерь энергии в индуктивных срывах потока с вихревыми жгутами, образующихся в быстрых маховых движениях крыла с относительно малым геометрическим удлинением;
2 – зазор между машущим крылом и крайними ограничивающими поверхностями регулируется, по возможности – динамически, по минимуму давления для предотвращения кавитационных разрывов сплошности в фазе ускоренного затягивания жидкости под крыло; что также предопределяет предельную интенсивность реактивного выброса жидкости в фазе приближения машущего крыла к крайним поверхностям короба – насадки;
3 – боковые и крайние грани короба выгибаются во внешние стороны и профилируются для взаимокомпенсации гидродинамических сил внутри и во вне ограничивающих стенок, что требуется для исключения срыва потока на задних кромках короба – насадки.
Машущий движитель может быть образован либо одним жестким горизонтальным плавником (рис. 6), либо двумя вертикальными жесткими крыльями (рис. 8), движущимся по симметричным траекториям в противофазе. Приводом движителя может служить либо кривошипно-шатунный механизм (рис. 2), либо автоматизированный комплекс линейных электродвигателей с цифровым адаптивным управлением.
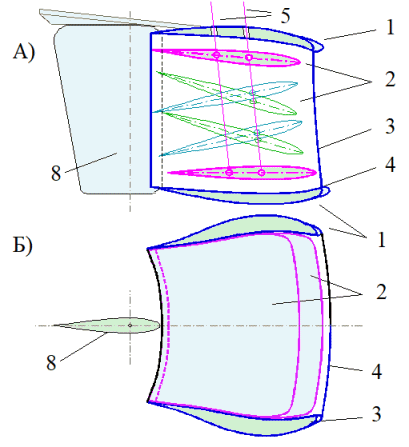
Рис. 6. Общий вид и схема механического действия плавникового движителя с одной жесткой горизонтальной лопастью. A) – вид в проекции бок; Б) – вид сверху в проекции полуширота.
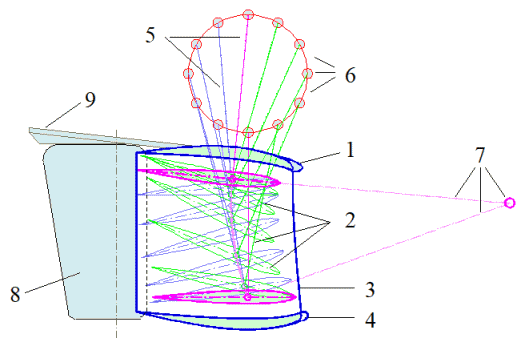
Рис. 7. Простейший вариант нерегулируемого механического привода горизонтального жесткого машущего крыла в коробе-насадке.
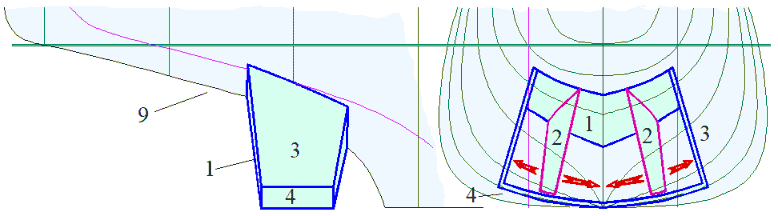
Рис. 8. Вариант вертикальных парных и симметрично действующих плавниковых движителей в коробе-насадке.
1 – специально профилированный короб – насадка, предназначенный для предотвращения индуктивного вихреобразования на концевых кромках машущего крыла – плавника.
2 – изображение жесткого крыла – плавника в различных фазах его машущих перемещений внутри короба-насадки.
3 – профилированная боковая стенка короба-насадки, имеющая внутреннюю поверхность с минимизированной щелью при концевой кромке крыла – плавника, и специальное профилирование и утолщение для выравнивания гидродинамического давления с целью предотвращения срывов потока и паразитного вихреобразования внутри и вовне короба-насадки.
4 – ограничивающие поверхности короба-насадки оптимизируются для достижения наибольшей эффективности реактивных выбросов жидкости из под приближающегося плавника, с последующим безотрывным затягиванием потока в новообразующуюся клиновидную полость в фазе отворота и отхода плавника от ограничивающей поверхности. Критерием оптимизации является контроль взаимокомпенсации вихревых разрывов на границах струйных течений со спутной вихревой пеленой и сходящими присоединенными вихрями из средних положений машущего крыла.
5 – штоки линейных электродвигателей или кривошипно-шатунного механизма на продольной оси (рис. 6.); или, раскачивающиеся шатуны на дисковых кривошипах (6) на поперечной оси в кормовом отсеке корабля (рис. 7.).
6 – простейший вариант силового механического кривошипно-шатунного привода для вертикальных перемещений с предопределенными поворотами лопасти жесткого плавникового движителя (рис. 7.). Плоскость крыла здесь устанавливается перпендикулярно перемещающемуся с раскачкой шатуну. Так же как и в случае адаптивного управления с помощью линейных электродвигателей (рис.7.), в механическом приводе желательно предусматривать некоторую обратную связь в отношении изменения радиуса кривошипа, или упругую амортизацию на шатунах во избежание повреждений движителя при затягивании клиновидные полости крупных посторонних предметов (плавунов, обломков льдин и т.п.).
7 – вариант тяговых направляющих для фиксации перемещений балансирного центра машущего крыла (рис. 7.). В реализации таких перемещений по внутренним направляющим на боковых стенках короба-насадки (рис. 6.) может быть предусмотрена дополнительная оптимизация кинематики и гидромеханики машущего крыла.
8 – перо руля устанавливается в ускоряемом потоке за горизонтальным машущем движителем. В случае пары симметричных вертикальных плавников (рис. 8), направление потока за движителем и управление курсом корабля может выполняться с помощью асимметричного сдвига вертикальных фаз плавников по правому и левому бортам, что будет обеспечивать необходимый поворот лопастей плавников при их схождении вблизи диаметральной плоскости корпуса корабля.
9 – кормовой подзор обеспечивает стабилизацию и горизонтальное выравнивание набегающего потока в условиях вертикальной качки корабля на штормовом волнении.
Маршевый движитель корабля – жесткое машущее крыло с реактивным сглаживанием спутных и сходящих вихревых потоков, и не обладающее энергетическими потерями от индуктивных срывов потока с концевых кромок крыла малого удлинения (жесткое машущее крыло в профилированном коробе-насадке – маршевый движитель корабля), предназначен для использования на плавсредствах различного класса и назначения, включая маломерный, подводный и крупнотоннажный флот речного, прибрежного и неограниченного океанского плавания.
Жесткое машущее крыло – маршевый движитель корабля (рис. 6) состоит из утолщенного крыла со скругленной передней и заостренной задней кромками. Концевые кромки такого крыла короткого удлинения двигаются с минимальным зазором у боковых стенок прямоугольного короба – насадки, с помощью которого исключаются индуктивные срывы потока и образование жгутов индуктивных вихрей на концевых кромках крыла. Утолщение специальное профилирование боковых и ограничивающих поверхностей позволяет выровнять поток внутри и снаружи короба – насадки.
Для компенсационного гашения цепочки спутных вихрей, образующихся в режиме крыла в средней фазе машущего плавника, в крайних положениях происходит синхронное сближение с ограничивающим поверхностями, где сначала происходит ускоренный выброс жидкости с образованием тонкой реактивной струи, затем создается разрежение с быстрым затягиванием струи жидкости под угловую полость между крылом и ограничивающей поверхностью. В оптимальном гидродинамическом режиме выброс реактивной струи раскручивает спутный поток из фазы движения плавника от среднего до крайнего положения, и последующий импульс с затягиванием потока порождает интенсивный противовихрь, действие которого нейтрализуется новообразующимся присоединенным вихрем в фазах от крайнего до среднего положения машущего крыла.
Маршевый движитель корабля – жесткое машущее крыло может быть создано с использованием механических приводов, размещаемых в кормовой оконечности корабля над движительно-рулевым комплексом (рис. 7.), либо с использованием линейных электродвигателей, непосредственно размещаемых в боковых стенках короба-насадки (рис. 6.).
При построении движителя из двух парных симметричных жестких вертикальных крыльев в коробе-насадке (рис. 8.), клиновидная полость для ускорения струйных потоков будет создаваться при сближении двух плавников, а отсутствие продольной переборки между ними позволит задействовать такой движитель в качестве активного руля с управляемым вектором тяги.
В проектировании и оптимизации механизмов движителя отрабатываются параметры перемещений жесткого плавника, с отработкой кинематических характеристик создаваемого движителем потока на синусоидальной траектории движения с учетом прогнозируемого скольжения для достижения заданной скорости хода корабля. Тогда втором этапе выполняется оптимизация гидродинамических профилей машущего крыла, боковых и ограничивающих стенок короба-насадки, с последующей проработкой вариантов динамического формирования клиновидных полостей в крайних положения плавника. В случае задействования линейных маршевых двигателей снижается строгость кинематической до-водки движителя, так как становится возможной динамическая адаптация кинематики машущего крыла под контролем датчиков реальной скорости потока и действующего давления в контрольных точках короба-насадки, что формально также расширяет возможности эффективной работы жесткого плавника..
В работе жесткого машущего крыла внутри короба-насадки исключается индуктивный срыв потока на заблокированных концевых кромках, и потому ничто не противопоставляется образованию вихревой пелены и сходу свободных вихрей с задней кромки машущего плавника. Оптимизация процессов гидромеханики жесткого плавника выполняется с использованием взаимодействия ускоренных струйных течений жидкости, создаваемых в крайних положениях крыла-плавника вблизи ограничивающих поверхностей в специально профилированном коробе-насадке. Эффективность движителя в насадке обеспечивается строгой нормировкой реактивных выбросов и ускоренных затягиваний струйных потоков жидкости в крайних положениях жесткого плавника вблизи ограничивающих поверхностей короба-насадки.

Рис. 9. При форсировании хода за жестким машущим движителем возникают пузырьки кавитации, после чего увеличение мощности на движителе не приводит к заметному улучшению ходкости.
В опытовых испытаниях самоходной модели, в моменты засасывания жидкости под лопасть жесткого крыла вблизи ограничивающей поверхности может проявляться кавитация, что служит признаком необходимости увеличения зазора в угловидной полости, что может быть выполнено динамически в процессе работы движителя, и что согласовано ослабит гидродинамический удар в моменты реактивного выброса жидкости при схождении плавника с ограничивающей поверхностью. Таким образом, регулирование по минимуму положительного давления под плавником в расходящемся потоке, обеспечит достижение оптимальной интенсивности всех струйных течений. В экспериментах не наблюдалось нарушений гидродинамического режима в работе плавникового движителя в буксирном режиме и на полном ходу, испытуемая самоходной модель создавала необходимое тяговое усилие с относительно гладким реактивным – поступательным потоком за движителем.
Регулирование величины маховых движений и, соответственно, увеличение зазора в угловидной полости с ограничивающей поверхностью, всегда приводило к резкому падению тягового усилия, и при этом кормовая часть корпуса начинала вибрировать в такт маховых движений жесткого крыла. Из этого следует предположение о возможности фиксации кинематики жесткого крыла относительно внутренних поверхностей профилированного короба-насадки.
Столь же нежелательный эффект наблюдается при работе относительно толстого профилированного крыла на заднем ходу. Крыло создавало значительно меньшую тягу с заметной вибрацией корпуса, однако в режиме торможения работа плавника может быть признана вполне эффективной.
Машущее крыло с управляемой пространственной геометрией лопасти является универсальным движителем, элементом управления и стабилизатором пространственного положения корабля [1]. Естественным природным аналогом движителя представляется хвостовой плавник морских животных, состоящий из последовательности гибких полосовых поверхностей с жесткими лучами-ребрами, выполняющими перемещения в цепной сцепке (рис. 10.), и с углами скольжения (наклона) по касательной к бегущей синусоиде, что в разные моменты времени образует геометрически сложные седловые поверхности со строго заданными скоростями деформации поверхности машущего крыла, при этом, для приведения в движение цепной линии плавника строго по синусоидальному закону, применимы различные механизмы на основе коленчатого вала, гибкой шарнирной плети или линейных шаговых электродвигателей.
Машущий плавниковый движитель устроен в виде последовательности гибких полосовых поверхностей между жесткими лучами-ребрами, выполняющими вертикальные перемещения в цепной связке, задающей плавное изменение углов наклона жестких лучей по касательной к бегущей синусоиде, иллюстрируемой на рисунке 10.
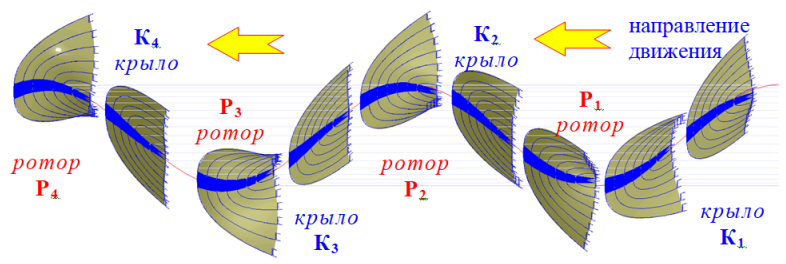
Рис. 10. Кинематическая последовательность вертикальных перемещений и сопутствующее изменение формы машущей поверхности симметричного гибкого плавникового движителя (справа - налево), при его движении по синусоидальной траектории в диаметральной плоскости за корпусом судна. В позиции К – плавник работает как крыло, в позиции Р – в режиме ротора.
В позиции К – крыло – максимальная скорость поперечного изгиба плавника соответствует максимальной скорости вертикальных перемещений и максимальному углу атаки, достигаемых на средней линии синусоиды. При этом плавник полностью распрямляется, создавая максимальную тягу за счет угла скольжения крыла, а его концевая кромка максимально быстро изгибается, создавая два вращательных потока, направленных навстречу гидродинамическим спутным вихрям, срывающимся в этот момент с концевой кромки крыла с наибольшей интенсивностью. Таким образом, происходит компенсация индуктивных потерь, характерных для жесткого крыла, которые в случае крыла короткого удлинения значительно ухудшает его качество.
2. Позиция Р – ротор. В крайних положениях поверхность плавника получает максимальное седловое искривление. Средняя линия плавника ложится на вершину синусоиды, что при поступательном движении в жидкости создает пониженное давление на внешней поверхности крыла. Линия крыла сильно искривлена во внешнюю сторону от ведущей синусоиды, концевые кромки максимально загнуты, и на них действует индуктивный вихрь, зародившийся в момент максимальной скорости махового движения плавника в позиции «К – крыло». Пониженное давление на осевой линии плавника затягивает концевые индуктивные вихри к диаметральной области. А за счет седлового изгиба плавника вихревое течение снова преобразуется в поступательное, что поддерживает тягу плавникового движителя в его крайних положениях.
При выходе из крайнего положения «Р – ротор» концевые поверхности крыла быстро распрямляются навстречу остаточным индуктивным вихрям, окончательно останавливают их вращение и отталкивают остатки воды по потоку назад. В этот момент, плавник вновь переходит к основному маховому движению, и крыло начинает распрямляться, а быстрый изгиб концевых поверхностей плавника снова привносит закрученный поток на концах гибкого крыла, которые компенсируют вновь образующиеся индуктивные вихри в момент распрямления поверхности крыла в среднем положении плавника «К – крыло».
Испытание натурной модели корабля показало, что плавниковый движитель обеспечивает требуемую тягу для поддержания высокой скорости хода и повышенную проходимость в сложных и штормовых условиях плавания.
Движитель может быть размещен под кормовым подзором надводного корабля, или в хвостовой части подводной лодки. При использовании динамически корректируемого движения плавникового движителя, он одновременно может действовать в качестве руля и успокоителя качки.
При сохранении возможности пассивного поступательного перемещения плавника под действием вертикальной качки корпуса корабля, при котором кинематика поверхности плавника будет чисто механически соответствовать геометрическим формам на заданных участках траектории [2], плавник будет работать в качестве пассивного штормового аварийного движителя, использующего энергию вертикальной качки корпуса корабля на волнении, воссоздавая возможности безопасного штормового маневрирования с остановленными главными машинами.
Для приведения в движение цепной линии плавникового движителя корабля строго по синусоидальному закону применимы различные механизмы:
1 – в форме коленчатого вала внутри корпуса судна, последовательно выдвигающего забортные штоки, между которыми закрепляются связанные в хребет жесткие ребра плавника;
2 – в форме гибкой шарнирной плети, последовательно и жестко сопрягающей углы слома ребер в цепной связке на синусоидальной траектории;
3 – в форме продольных тросовых тяг, задающих пространственную ориентацию звеньев хребта с помощью поперечных рычагов, установленных в средней части ребер плавникового движителя.
4 – с помощью линейных электродвигателей с цифровым управлением, поддерживающих сложные законы движения и динамической трансформации плавникового движителя, с автоматической регулировкой общего размаха и наклонов локальных фрагментов на лопасти движителя в зависимости от тяги и скорости; в том числе возможностью отклонения от симметрии законов движения для управления курсом и стабилизации корпуса корабля одновременно.
При реализации механических приводов по схемам 1-3 плавник естественным образом будет работать в качестве пассивного движителя, использующего энергию вертикальной качки корпуса корабля на морском волнении. При реализации управляемого движителя по схеме 4, для включения его в работу в пассивном режиме можно предусмотреть соответствующие блокировки цепной линии для аналогичного перевода плавника в режим пассивных перемещений по синусоидальным траекториям из схем 1-3.
Точечно закрепленный плавник у борта корабля несколько снижает интенсивность взаимокомпенсации индуктивный и присоединенных вихревых структур в условиях наложения спутной пелены на вращение лучей относительно точки крепления на бортовой обшивке.
Непротиворечивым техническим решением представляется построение гидромеханики такого движителя в режиме гибкого крыла при выстраивании жестких лучей на удалении – ближе к нормали относительно судовой обшивке; с последующим приведением плавника к схемам ускоренных струйных течений в моменты его распрямления вблизи или при поверхности бортовой обшивки. Именно такой режим работы бокового плавникого движителя можно наблюдать в живой природе.
Такая условно промежуточная схема действия движителя представляется гибким плавником с жесткими лучами-ребрами, локально закрепляемыми в скуловой части бортовой обшивки корабля, где в погружаемом размахе существует относительно свободное пространство для режимов К-крыла и Р-ротора, а в фазе подъема плавника в области пониженного давления происходят процессы ускоренного затягивания с последующим реактивным выбросом струй жидкости на подавление остаточного комплекса от всех сходящих с крыла индуктивных, спутных и присоединенных вихревых структур.
Скуловой раскачивающийся плавник в полной мере соответствует критериям непротиворечивого проектирования по условиям взаимокомпенсации потерь энергии в нестационарных процессах гидромеханики. Кроме режима простого махового движителя, плавник – стабилизатор может использоваться для точного позиционирования морских объектов, в качестве бортового стабилизации качки [2] или аварийного штормового движителя.
В отличие от вышеописанных жесткого и гибкого машущих крыльев, оптимизация гидромеханики настоящего скулового плавника не предполагает строго периодических маховых движений, при одиночном полном взмахе плавник создаст относительно большой импульс тяги; если же плавник будет действовать на удалении от обшивки корпуса с малой амплитудой маховых движений, то тяговые усилия будут весьма слабыми, однако контролируемыми в плане стабилизации пространственного положения корпуса корабля с прецизионной точностью.
Прототипом движителя представляются некоторые виды рыб, способные весьма быстро перемещаться без использования хвостового плавника. Инженерным решением видится гибкий плавник с жесткими лучами-ребрами, создающими возможность управляемой геометрией машущей лопасти в соответствии со строгими кинематическими алгоритмами. Плавник устанавливается в скуловой части корпуса корабля в герметичном поворотном приводе, и служит импульсным вспомогательным движителем и активным стабилизатором, отличающимся тем, что:
– в исходном положении лопасть приложена к бортовой обшивке корабля, а в моменты отдаления и приближения к корпусу образует полости для струйного затягивания набегающего потока при отдалении, и его реактивного выброса при возврате лопасти к корпусу, с образованием струи навстречу и на раскрутку полуфазы объединенного спутного и индуктивного вихря для воссоздания поступательного потока в следе плавникового движителя;
– передняя кромка имеет плавный изгиб с завершением по касательной к концевой кромке, и образующей острый угол с задней кромкой, что в фазе машущего крыла создает условия взаимокомпенсирующего влияния индуктивного вихря со спутной вихревой пеленой;
– концевой фрагмент лопасти динамически изгибается на опережение маховых движению в фазе крыла, что компенсирует индуктивный срыв потока и способствует установлению встречного вихря в конечном положении лопасти в фазе ротора, с предотвращением развития нового индуктивного вихря и спутной пелены в возвратной полуфазе маховых движений плавника;
– условный поворот герметичного привода плавника изменяет направление тяги движителя, что важно для активной стабилизации надводного корабля или подводной лодки без хода, в то же время для стабилизации корпуса корабля относительно набегающего потока может быть достаточно фиксации изгибов поверхности плавника в стандартных фазах маховых деформаций.
– плавниковый движитель может расправляться и всей своей поверхностью прижиматься к бортовой обшивке корабля, если отпадает необходимость в его использовании, например в условиях интенсивной бортовой качки в штормовом плавании.
Ключевым элементом движителя представляется объединенная одним жестким ребром передняя и концевая кромка лопасти крыла-плавника, которая создает необходимый опережающий изгиб плавника навстречу маховому развороту лопасти. За жестким ребром передне-концевой кромки следуют внутренние ребра со сглаживающими перепонками, либо специально армированная гибкая поверхность, участвующие в маховых движениях по предопределенной кинематической схеме с равномерным распределением силовых нагрузок и оптимальным скольжением локальных фрагментов лопасти плавника относительно им же завихренных потоков жидкости.
В исходном положении лопасть плавника может быть прижата к судовой обшивке, и таким образом исключаться из текущих гидродинамических процессов у борта корабля. В начальный фазе, при отвороте плавника от корпуса, отдаляется ребро передней кромки с небольшим запаздыванием концевого фрагмента, отчего образуется раскрывающаяся полость, в которую устремляется поток воды, создавая начальный импульс тяги.
В следующий момент передняя кромка отклоняется с опережением основной лопасти крыла, отчего на концевом участке лопасти будет создаваться закручивание потока навстречу новообразующемуся индуктивному срыву потока. К сожалению, вращение всей лопасти плавника относительно неподвижной точки на обшивке корпуса допускает лишь частичную взаимокомпенсацию спутного и индуктивного вихреобразования, что снижает эффективность скулового движителя в режиме машущего крыла на удалении ни бортовой обшивки. В момент прохождения фазы ротора в конечном положении крыла на удалении от корпуса корабля, поверхность плавника в распрямленном состоянии теряет скольжение и получает максимальную скорость изгиба, и в тот момент происходит полная компенсация спутного вихра из фазы крыла в среднем положении, и образуется компенсирующий противовихрь на новую четверть фазы махового движения плавника.
После изменения знака угла скольжения передняя кромка лопасти приближается к судовой обшивке, концевой фрагмент также симметрично опережает среднюю часть лопасти, из образующейся полости происходит выброс реактивной струи, догоняющей и вступающей во взаимодействие с зарождающимся на концевой кромке спутным вихрем, который трансформируется в поступательный поток жидкости, что служит признаком повышения эффективности плавникового движителя в целом.
В безымпульсном режиме, без приближения плавника к обшике корпуса или ограничивающим поверхностям, плавниковый движитель создает относительно небольшую тягу, одновременно исполняя функции активного стабилизатора корпуса, что в случае поворота механизма в герметичном приводе на борту корабля позволяет стабилизировать корпус надводного корабля или подводной лодки без хода, в том числе позволяя компенсировать постояннодействующие кренящие моменты под давлением ветра, на циркуляции и др.
Гибкое машущее крыло, как вспомогательный импульсный движитель – активный стабилизатор, устанавливается в поворотном или фиксированном герметичном приводе для ребер плавника в скуловой части обшивки корпуса надводного корабля или подводной лодки.
Принцип действия плавникового движителя основывается на кинематических схемах гидромеханики гибкого машущего крыла в свободном потоке [1], в фазах крыла и ротора на удалении от обшивки корпуса корабля, с дополнительным режимом струйных импульсных ускорений в фазах приближения плавника к бортовой обшивке корабля.
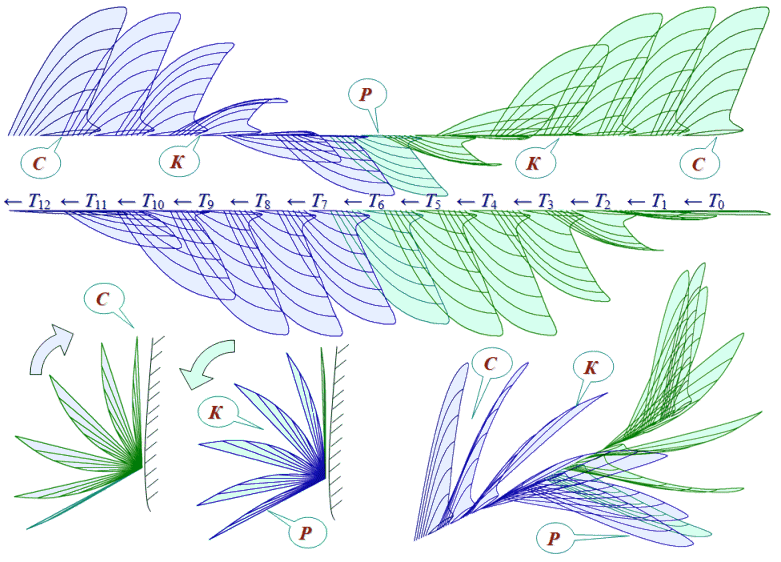
Рис. 11. Прорисовка 12 интервалов в последовательности изменения угловой фазы и геометрической формы гибкого плавникового движителя, устанавливаемого в скуловой части корпуса корабля или подводной лодки.
К) – среднее положение плавника в режиме крыла (рис. 11,12) с максимальной скоростью маховых перемещений. В отличие от полного распрямления машущего движителя в свободном потоке [1], лопасть поворотного плавника в среднем положении получает максимальный изгиб, при котором происходит встречное закручивание потока для компенсации индуктивного, а затем и спутного спутного вихреобразования.
Р) – в крайнем положении на удалении от корпуса (рис. 11,12) по синусоидальной траектории локальные отсчеты углов скольжения по лопасти плавника становятся нулевыми, поэтому полезная тяга или торможение на движителе также прекращают действие. При этом важно, чтобы кинематика трансформации лопасти обеспечивала полное гашение индуктивного и спутного вихреобразования, что даст возможность временной фиксации лопасти в крайнем положении, при котором остаточный угол поворота распрямленной лопасти послужит активной стабилизации корпуса по крену и дифференту корабля.
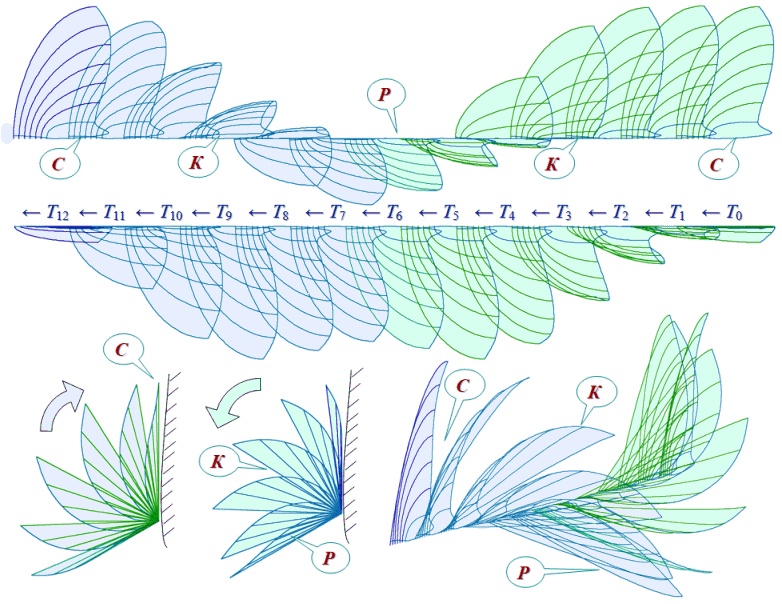
Рис. 12. Прорисовка 12 интервалов последовательного изменения угловой фазы и геометрической формы гибкого плавника с большими углами атаки, образующими локальные углы скольжения по потоку для тяжело нагруженного движения на относительно малой скорости хода вперед.
С) – в крайнем положении вблизи корпуса корабля (рис. 11,12) лопасть плавника вступает в интенсивное силовое взаимодействие с обшивкой, как с ограничивающей поверхностью. В отличие от положения на удалении от корпуса, неподвижные корневые фрагменты лопасти не могут участвовать в компенсационном закручивании потока, и потому в нестационарном маховом движении плавника может быть полезным процесс порождение свободного спутного вихря, динамически смещаемого смещен к средней части лопасти с помощью симметричного динамического изгиба концевого фрагмента машущего плавника. Этот же изгиб позволит создать клиновидную полость вблизи обшивки корпуса, из которой будет произведен реактивный выброс жидкости, который вступит во взаимодействие со встречным потоком вблизи обшивки корпуса из новообразующегося свободного спутного вихря. Таким образом произойдет усиление полезного упорного импульса, и свободный спутный вихрь отчасти трансформируется с поступательный поток в следе за движителем, что также послужит свидетельством повышенной эффективности машущего плавникового движителя. Вблизи корпуса плавник также может быть приостановлен, и он не будет участвовать в движении корабля по инерции. Отход плавника от корпуса должен быть максимально быстрым, ограничивающим критерием может быть предотвращение вихревого или кавитационного разрыва сплошности жидкости при возникновении отрицательного давления. Затягивание жидкости под крыло представляется таким же струйным потоком с интенсивным вихреобразованием на его границе с невозмущенной жидкостью. Одновременно с удалением плавника от корпуса начинается изгиб лопасти навстречу маховому движению, при этом закручиванием потока происходит в сторону усиления вихря от затягиваемого под крыло потока. Таким образом воссоздается противовихрь для спутной пелены и индуктивного срыва потока на передне-концевой кромке лопасти, что и требуется для полной взаимокомпенсации вихреобразования в процессе прохождения фазы А) – в среднем положении крыла, и с переходом конечное положения в фазе В) – на удалении от корпуса.
Гибкий машущий плавник предназначен для работы в качестве вспомогательного движителя, обеспечивающего импульсную тягу в режимах маховых движений в фазе крыла со струйными потоками вблизи бортовой обшивки корабля. Движитель также способен создавать относительно небольшую тягу в безымпульсном режиме, одновременно исполняя функции активного стабилизатора, в том числе с возможностью работы без хода корабля.
В качестве активного стабилизатора скуловой движитель наиболее актуален для судов с малыми моментами инерции площади действующей ватерлинии и, соответственно, с большими собственными периодами качки, для которых скуловой движитель-стабилизатор сможет компенсировать постоянные углы крена под действием ветра или центробежных эффектов на циркуляции, а также для исправления ходового дифферента или предотвращения зарываемости под встречную штормовую волну и др.
Гибкое крыло с локальным приводом у борта корабля, плавниковый движитель – активный скуловой стабилизатор, может приводиться в движение с помощью кинематических схем на основе кривошипно-шатунных раскачивающих механизмов. Величина размаха регулируется изменением расстояния оси коленчатого вала до точки крепления ребер плавника, небольшое изменение направления создаваемого потока возможно с помощью поворота его оси в противоположную сторону, а механическое переключение шага синусоидальных деформаций плавника может быть выполнено фиксированными переключениями поворотных муфт кривошипа с помощью подбора фазовой скорости и размаха ребер плавника для полуавтоматического перехода на новые углы жесткого или упругого зацепления.
Использование линейных двигателей в качестве силовых электроприводов позволит оптимизировать работу плавникового движителя в строгом соответствии с предначертанными математическими моделями и с учетом обратных связей для достижения безотрывного обтекания и равномерного распределения силовой нагрузки по всем фрагментам лопасти плавника. Для линейного привода становится естественной некоторая корректировка углов скольжения в крайних положениях плавника, что соответствует режиму работы движителя с динамически регулируемым вектором тяги, и что фактически означает его одновременное действие в качестве движителя и стабилизатора корпуса надводного корабля или подводной лодки.
В практическом проектировании и оптимизации машущего движителя отрабатываются кинематические параметры перемещений гибкого плавника для получения необходимого потока с учетом синусоидального шага со скольжением для заданных скоростей корабля, включая штормовые и аварийные режимы плавания. На втором этапе осуществляется оптимизация изгибов передней кромки и внутренних ребер, скорости, размаха и синусоидального шага плавника, с последующей проработкой вариантов динамического формирования клиновидных полостей вблизи обшивки корабля и местных скоростей закручивания потока в концевых фрагментах лопасти плавника.
Важно заметить необходимость строгого регулирования скорости и угла лопасти плавника в динамике его приближения и отдаления от поверхности судовой обшивки. Нарушение оптимального кинематического режима приведет к кавитационно-вихревым разрывам сплошности жидкости или гидродинамическим ударам при слишком малом зазоре, или к вихревому запиранию набегающего потока и торможению хода корабля при медленном или недостаточно близком прохождении лопасти близи обшивки.
В полную противоположность машущим крыльям, в случае волнового движителя не рассматривается образование спутной пелены на задней кромке плавника, влияние которой на протяженном плавнике может быть незначительным, либо таковая кромка может отсутствовать или сопрягаться с машущим хвостовым плавником.
Рис. 13. Внешний вид и схема раскачивания лучей протяженного волнового движителя в распрямленном состоянии [33]. Пунктиром показан характер искривления рабочей поверхности плавника при его простом наклоне.
Протяженный волновой плавниковый движитель образуется цепью раскачивающихся лучей-ребер, связываемых между собой и с обшивкой корпуса гибко-упругой поверхностью, отличающийся тем, что:
1 – лучи-ребра устанавливаются на продольных осях с индивидуальным приводами, обеспечивающими последовательный поворот ребер с образованием волновой линии на концевой кромке межреберной поверхности;
2 – между ребрами и поверхностью судовой обшивки создается гибко-упругая поверхность из растягивающихся полимерных материалов или продольных пластин, образующих плавное панцирно-чешуйчатое соединение вдоль линий тока жидкости;
2 – каждое ребро имеет специально оптимизированный изгиб, создающий опережающее и вращательное движение концевой кромки межреберной перепонки, обеспечивающее компенсацию индуктивного вихреобразования и предотвращение срыва потока на концевой кромке сверхкороткого удлинения;
3 – в буксировочном режиме с малой скоростью и усиленной тягой, углы наклона лучей-ребер волнового движителя могут достигать поверхности судовой обшивки, где опережающее движение концевой кромки-ребра будет создавать захват части жидкости для ускоренного реактивного выброса из полости между плавником и корпусом корабля.
4 – пара протяженных волновых движителей может устанавливаться горизонтально вдоль бортов корабля, при этом его эффективность может повышаться при движении вблизи поверхности морского дна, либо при сближении плавников в вертикальном положении под днищем корабля.
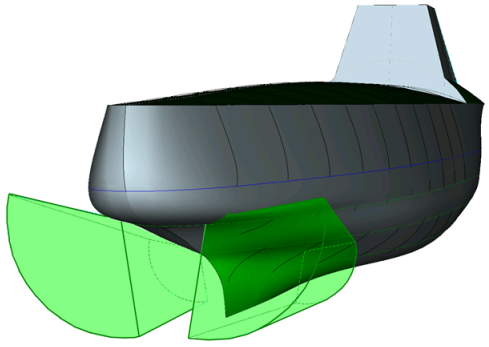
Рис. 14. Вариант расположения волнового движителя в кормовом подзоре корабля.
Преимуществом волнового движителя является возможность разделения нагрузки между многочисленными лучами-ребрами, что возможно контролировать динамически непосредственно при работе протяженного плавника. При этом каждый луч может управляться независимо, что позволит задействовать движитель в качестве руля управления, стабилизатора качки и аварийного штормового движителя.
Вблизи корпуса современного корабля существует единственная зона со стабильным по направлению течением, где могут использоваться крыльевые системы для успокоения килевой и бортовой качки в штормовых условиях. Это зона значительно ускоренного потока непосредственно за гребными винтами корабля, где обычные поворотные крыльевые системы могут работать вполне эффективно.
Внешнее штормовое воздействие на корпус корабля настолько велико, что силовое сопротивление может грозить лишь авариями и поломками забортных механизмов. Однако, в случае оптимизации корпуса корабля и общекорабельной архитектуры с целью минимизации внешних воздействий [6, 8, 9], построенной на принципах взаимного снижения восстанавливающих и возмущающих сил и моментов, как это часто и бывает в сложной технике, приводит к усилению негативных проявлений воздействий другой или второстепенной природы, традиционно считавшихся незначительными. Так, стабилизация качки за счет уменьшения моментов инерции площади действующей ватерлинии может привести к излишнему крену под действием ветра или быстрых перекладок рулей; а также к избыточному дифференту при ускорении или реверсировании хода. В аналогичных условиях пребывают подводные лодки в надводном положении.
Для эффективной компенсации остаточных внешних или штормовых воздействий на корпус корабля востребуются такие активные стабилизаторы бортовой и килевой качки в струе за гребными винтами, обладающие достаточной управляющей энергией для компенсации всех изначально неучтенных и условно «незначительных» внешних сил.
Для стационарного крыла отсутствуют инженерные решения для взаимокомпенсации вихревых структур на поверхности и кромках поворотного крыла, однако принципы непротиворечивого проектирования подсказывают возможность использования такого крыла в качестве пассивного штормового аварийного движителя, чему способствует предельно интенсивная штормовая вертикальная качка под относительно объемным кормовым подзором корабля.
Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель [2] состоит из двух управляемых крыльев или поворотных насадок на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов, отличающиеся тем, что:
- поворотные баллеры крыльев допускают упругий люфт не менее чем до углов ±30°, обеспечиваемый пружинным (или электромагнитным) устройством с восстанавливающим моментом пропорциональным отклонению крыла от нейтрального нулевого, или заданного аппаратурой управления угла;
- оси баллеров проходит через гидродинамический центр бокового сопротивления крыльев, что минимизирует усилия на их перекладку на больших скоростях хода корабля;
- при повороте крыльев враздрай, на ходу корабля создаются кренящие моменты для компенсации бортовой качки; при повороте крыльев вместе на всплытие/погружение – создаются дифферентующие моменты для компенсации килевой качки;
- при использовании двух наклонных крыльев, они одновременно будут выполнять функции рулевого устройства с неуправляемым компенсатором центробежного крена на циркуляции, и поддерживать улучшенные условия для безопасного маневрирования на крупном волнении;
- при использовании горизонтальных крыльев совместно с традиционным вертикальным судовым рулем, законы автоматического управления рулем и крыльями становятся независимыми, что позволяет комплексно решать задачи маневрирования и стабилизации корпуса корабля на больших скоростях хода и в условиях штормового волнения;
- в случае остановки гребных винтов на крылья начинают действовать вертикальные потоки жидкости, обусловленные вертикальными перемещения кормовой части корабля в штормовых условиях, при этом крыло упруго поворачивается и создает тяговое усилие для движения корабля вперед, величина которого в гидростатическом приближении многократно превосходит силовое усилие на рычаге между осью баллера и центром площади крыла.
Эффективность активного крыла-стабилизатора может быть достигнута для корпуса корабля повышенной штормовой мореходности, не обременённого избыточно большим запасом плавучести, и без скуловых килей и прочих активных крыльевых систем в средней или скуловых частях корпуса, которые могут переопределить или вывести из устойчивого состояния алгоритмы к управления настоящего стабилизатора.
Активные стабилизатор строится с помощью двух управляемых крыльев или поворотных насадок на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов. Механизм поворота баллера обладает упругим люфтом до ±30°, реактивный момент которого обеспечивается пружинным (или электромагнитным) устройством с возвращающим моментом, зависящим от тягового усилия главного двигателя, и формально тем большим, чем больше крыло отклонено от заданного системой управления нейтрального положения. Таким образом, при потере хода, относительно полная кормовая оконечность обретет интенсивную вертикальную качку, в которой упругие повороты крыла переведут работу крыла в режим аварийного штормового движителя.
Баллеры стабилизирующих крыльев устанавливаются горизонтально или наклонно. Ось баллера проходит через гидродинамический центр бокового сопротивления крыла, находящемся в 1/3 длины хорды от передней кромки крыла, что минимизирует усилия на перекладку стабилизирующий крыльев. Поворот плоскостей крыльев на ходу корабля приводит к образованию кренящих и дифферентующих моментов для компенсации килевой и бортовой качки корабля. При повороте крыльев враздрай будут создаваться кренящие моменты для компенсации бортовой качки, при повороте вместе на всплытие/погружение – создаются дифферентующие моменты для компенсации килевой качки.
В случае остановки гребных винтов на крыло активного стабилизатора перестает действовать набегающий поток, а возникающая вследствие остановки судна интенсивная килевая качка создает вертикальные потоки жидкости с центром приложения гидродинамических сил в центре площади крыла, смещенном относительно оси баллера в корму. Подпружиненное крыло получает возможность упругого поворота, отчего вертикальный поток жидкости преобразуется в горизонтальный, крыло соскальзывает, и появляется тяговое усилие для движения корабля вперед, величина которого в гидростатическом приближении в шесть раз превосходит силовое усилие на рычаге между осью баллера и центром площади крыла.
Крылья активного стабилизатора качки могут быть установлены горизонтально, рядом с традиционным судовым рулем, или наклонно, взяв, при этом, на себя функции руля управления. Наклонные крылья при перекладке на борт создадут кренящий момент на тот же борт, чем компенсируются центробежные силы, возникающие на циркуляции корабля. При работе в качестве успокоителей качки, наклонные крылья одновременно будут поворачивать судно в сторону волнового воздействия, что соответствует маневру на уменьшение опасности, и что особенно важно при движении на курсах по волне в условиях возможного брочинга.
Формально наклонные крылья без судового руля управления будут создавать недостаточное количество управляющих воздействий, и при их проектировании необходимо решение задачи минимизации кренящих сил, сопутствующих обычному повороту корабля. Однако такая схема активного стабилизирующего устройства – аварийного штормового движителя наиболее технологичная и проста в реализации, так как механизмы поворота крыльев будут устанавливаться внутри корпуса корабля, а не на вынесенном за борт рудерпосте пера руля.
В случае использования вертикального пера руля и двух горизонтальных стабилизирующих крыльев математические законы управления обретают свойства достаточности. В частности это означает, что на тихой воде стабилизаторы качки смогут легко скомпенсировать крен, возникающий при циркуляции корабля с малой начальной остойчивостью при его движении на больших скоростях хода, что также является важным мореходным качеством корабля.
В исследованиях штормовой мореходности корабля отмечается низкая эффективность активных крыльевых успокоителей качки в средней части корпуса корабля [7], и указываются факторы повышенной опасности опрокидывания судна под ударами гребней штормовых волн, если на корпусе имеются скуловые кили, что связано с большой величиной и непредсказуемостью поперечных составляющих скорости внешних течений в условиях интенсивного штормового волнения.
Поперечные составляющие течения вблизи корпуса корабля, идущего полным ходом вперед, отсутствуют только под кормовым подзором, непосредственно за работающими гребными винтами. Установка активных крыльевых успокоителей качки в потоке гребных винтов является главным условием для реализации законов управления крыльевыми устройствами, которые должны действовать на упреждение силового воздействия одиночных гребней штормовых волн [10], и что возможно только под непрерывным контролем точности задания и исполнения компенсационных кренящих и дифферентующих моментов. За гребными винтами действует набегающий поток, скорость которого значительно превосходит скорость хода судна, что также повышает эффективность работы активных успокоителей качки, а при специальном профилировании поверхностей крыльев, возможно небольшое увеличение качетсва маршевых движителей за счет перенаправления и продольного ускорения закрученного за винтами потока жидкости.
В случае потери хода в штормовых условиях плавания, корабль немедленно подвергается интенсивной килевой качке, а кормовая часть корпуса получает значительные вертикальные колебания под воздействием штормовых волн, что обусловлено широкими кормовыми ватерлиниями и условно большим надводным объемом корпуса над кормовым подзором, устраиваемым для обеспечения безотрывного потока в зоне действия гребных винтов. Наличие интенсивных вертикально-поперечных потоков в кормовой оконечности корабля является достаточным условием для активизации крыльевых устройств в качестве машущих плавниковых движителей, действие которых начинает проявляться в наиболее опасных аварийных режимах штормового плавания корабля с остановленными машинами. Гидродинамическим достоинством настоящего изобретения является техническое решение, при котором механическое действие аварийного плавникового аквадвижителя будет проявляться без каких-либо дополнительных силовых управляющих воздействий на крыльевые устройства. Отчасти эти же крылья продолжат служить пассивными успокоителями качки, способствуя дополнительному демпфированию ударов под кормовой подзор корпуса, и отчасти предотвращая опасность гидродинамического захвата корпуса и опрокидывания корабля в случае быстрого падения под гребень последующей штормовой волны.
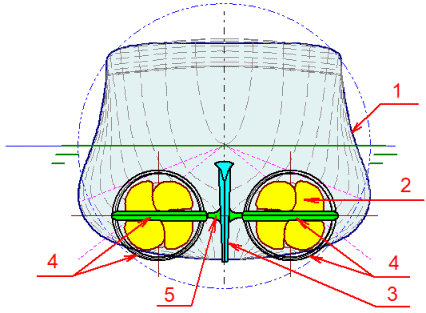
Рис. 15. Винто-рулевой комплекс с традиционным вертикальным рулем (3) и горизонтальными крыльями активных успокоителей килевой и бортовой качки (4), которые в случае остановки гребных винтов (2) начинают работать в качестве аварийных штормовых движителей, использующих энергию интенсивных вертикальных перемещений кормовой части корабля под воздействием штормового волнения. 1 – корпус корабля, оптимизированный для плавания в условиях интенсивного штормового волнения; 4 – горизонтальное крыло активного успокоителя килевой и бортовой качки, которое может быть жестко соединено с поворотными насадками, закрепленными на том же горизонтальном баллере крыльевых успокоителей; 5 – силовые узлы для активного управления крыльевыми успокоителями качки и сдерживаемого пружинами разворота крыла, при его работе в качестве пассивного штормового движителя.
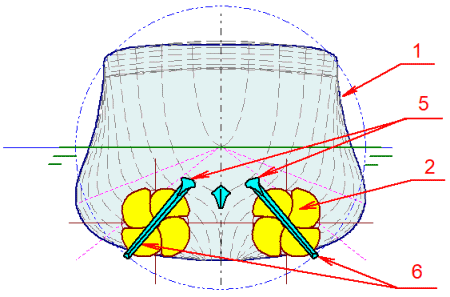
Рис. 16. Вариант винто-рулевого комплекса с наклонными крыльями активных успокоителей килевой и бортовой качки (6), одновременно служащих рулями управления, а в случае остановки гребных винтов – в качестве аварийных штормовых движителей, использующих энергию килевой качки и интенсивные вертикальными перемещения кормовой части корабля под воздействием штормового волнения. На тихой воде, использование этих крыльев в качестве рулей будет одновременно компенсировать центробежные силы и кренящие моменты на циркуляции, позволяя тем самым быстрые повороты на полных ходах, в том числе для судов с исчезающее малой начальной остойчивостью. Наклонные крылья-рули, также как и горизонтальные (рис.16.), могут быть совмещены с поворотными насадками на гребных винтах, создающими управляемый вектор тяги на ходу корабля, и не теряющими свойства аварийных штормовых движителей при остановке главных машин.
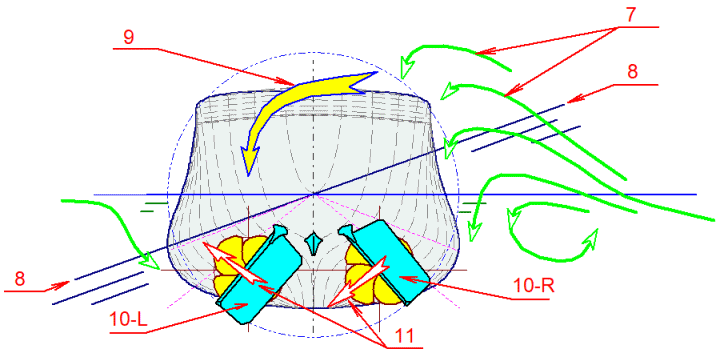
Рис. 17. Силовое воздействие гребней штормовых волн (7); условно наклонная поверхность штормового моря вблизи корпуса корабля (8), и образующийся под их суммарным воздействием кренящий момент (9). Поворот правого крыла (10-R) на погружение на затопленном волной борту, где образовалась избыточная плавучесть, и левого крыла (10-L) – на всплытие – для компенсации массы-объема оголившегося борта, создают необходимую пару сил для компенсации воздействия внешнего кренящего момента (11).
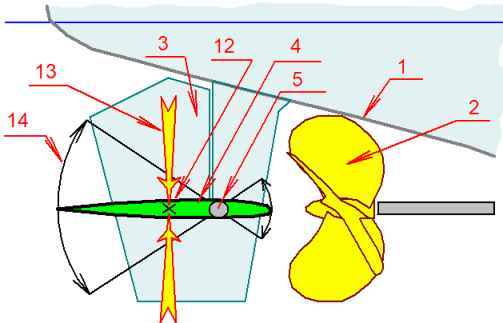
Рис. 18. Расположение винто-рулевого и стабилизирующего комплекса под кормовым позором корпуса (1), и схема действия горизонтального крыла (4) активного успокоителя килевой и бортовой качки корабля, одновременно являющегося штормовым движителем. 1 – корпус корабля, оптимизированный для условий штормового плавания; 2 – гребной винт; 3 – перо вертикального руля в диаметральной плоскости судна; 4 – горизонтальное крыло активного успокоителя килевой и бортовой качки; 5 – горизонтальный баллер установлен строго на линии балансирной оси для гидродинамических моментов, вызываемых потоком гребного винта, и допускает упругий (подпружиненный) поворот крыла на угол порядка ±30°. 12 – геометрический центр площади горизонтального крыла, к которому сводится суммарная сила (13) при вертикальных перемещениях кормовой части корабля. Создаваемый при этом вращающий момент относительно подпружиненного баллера (5), приводит к повороту крыла и созданию гидродинамической тяги для поддержания штормового хода и управляемости корабля. 13 – приведенные векторы вертикальных сил на горизонтальном крыле (4), приводящие к образованию поворачивающих крыло моментов относительно баллера (5), образующихся в процессе вертикальных перемещений кормовой части корабля в условиях штормового волнения. 14 – угол пассивного упругого поворота плоскости крыла под воздействием внешних вертикальных потоков жидкости. При включенном агрегате активной стабилизации качки, крыло должно также упруго отклоняться от динамически заданного угла атаки, что позволяет избежать излишних потерь хода при непредсказуемых изменениях направления потока вблизи стабилизатора, и предотвратит ударные нагрузки на горизонтальное крыло при оголении кормового подзора в штормовых условиях плавания.
В штатном режиме работы активный успокоитель качки (рис. 15, рис. 16), по командам от измерительно-аналитической системы для краткосрочного прогноза внешнего волнового воздействия на корпус корабля, перекладывает горизонтальные (наклонные) крылья враздрай для компенсации кренящих моментов, или совместно на всплытие/погружение для компенсации дифферента при килевой качке. Для совместной компенсации кренящих и дифферентующих моментов, в законах управления крыльями применяется правила сложения углов перекладки стабилизирующих крыльев.
Наклонные крылья (рис. 16) служат также рулями управления, которые при перекладке одновременно создают кренящий момент на тот же борт, чем компенсируются центробежные силы, возникающие на циркуляции корабля. При работе в качестве успокоителей качки, наклонные крылья одновременно поворачивают судно в сторону волнового воздействия, что соответствует маневру на уменьшение опасности, и что особенно важно при движении на курсах по волне в условиях возможного брочинга.
В случае остановки гребных винтов в условия штормового волнения, корабль немедленно подвергается интенсивной и ничем не сдерживаемой килевой качке, при которой огромный надводный объем в кормовой части корпуса приобретает наиболее сильные вертикальные раскачивания. В столь опасных условиях для плавания, подпружиненные кормовые крылья, способные поворачиваться на угол порядка ±30° под действием сил от вертикальных потоков жидкости, начинают отражать эти потоки в корму, что создает гидродинамическую тягу для начала движения судна вперед, и поддержания его управляемости в штормовых условиях аварийного плавания. При этом эффективность машущих крыльев тем выше, чем крупнее и опаснее штормовое волнение, и, соответственно, возникает наибольшая потребность в обеспечении штормового маневрирования для предотвращения гибели корабля.
Упругие (подпружиненные) перекладки крыльев, в работе активных успокоителей качки, позволят смягчать гидродинамические удары, и способствовать меньшим потерям хода при резких воздействиях на винторулевой комплекс со стороны штормовых волн. При оголения крыльев над впадиной волны, в последующей фазе сближения кормового подзора с быстро возвышающимся гребнем волны, упругий отворот крыла убережёт механизмы от разрушения в момент жесткого удара о поверхность воды.
Таким образом, достигается законченное техническое решение при построении «Активного стабилизатора килевой и бортовой качки корабля – штормового аварийного аквадвижителя», удовлетворяющего принципам непротиворечивого проектирования корабля в плане согласования гидромеханики новых корабельных механизмов, с положительными эффектами на линейных маршрутах и в штормовых условиях плавания.
1. Храмушин В. Н. «Корабль с плавниковым движителем». Патент № 2360831 от 10.07.2009 г. Бюл. № 19.
2. Храмушин В. Н. «Активный стабилизатор килевой и бортовой качки корабля – штормовой аварийный движитель». Патент № 2384457 от 20.03.2010 г. Бюл. № 8.
3. Корытко А. С., Храмушин В. Н. Исследование путей создания сверхмалого телеуправляемого корабля. Вестник ДВО РАН, 2006, № 1, с.115-122.
4. Файн А. В., Храмушин В. Н. Тензорное представление алгоритмов вычислительной гидромеханики // Вестник ДВО РАН. 2004. № 1. С. 52–68.
5. Храмушин В. Н. Трехмерная тензорная математика вычислительных экспериментов в гидромеханике. Владивосток: ДВО РАН, 2005. - 212 с.
6. Храмушин В. Н. Поисковые исследования штормовой мореходности корабля. Владивосток: Владивосток: Дальнаука, 2003. - 172 с. + третье издание
7. История штормовой мореходности (от древности до наших дней): по материалам поисковых и научно-исследовательских работ. Калининград, 1975–Владивосток–Санкт-Петербург–Сахалин, 2003 / В.Н. Храмушин, С.В. Антоненко, А.А. Комарицын и др. Южно-Сахалинск: Сах. кн. изд-во, 2004. –288 с.,ил. + CDROM.
8. Храмушин В. Н. Корабль без бортовой качки на волнении. Патент № 2360827 от 10.07.2009 г. Бюл. № 19.
9. Храмушин В.Н. Корабль без килевой качки на ходу на волнении. Рег.№ 2007133625 от 07.09.2007 г., вх.№ 036722. Бюл.№ 8 от 20.03.2009 г.
10. Храмушин В.Н. Навигационный комплекс контроля состояния моря, атмосферы и мореходности корабля // Крыловские чтения. Проблемы мореходных качеств судов и корабельной гидромеханики / Сборник избранных докладов. 21-23 октября 2003 г. (6-10 декабря 2006 г). – СПб, Изд-во Остров. 2007. С. 17-32.
11. Wang, S., He, G., & Liu, T. (2019). Estimating lift from wake velocity data in flapping flight. Journal of Fluid Mechanics, 868, 501-537. doi:10.1017/jfm.2019.181
12. Vasily Khramushin. Shipbuilding Researches for a Small Autonomous Hydrophysical Vessel // Proceedings of the 3nd Asia-Pacific Workshop on Marine Hydrodynamics. Shanghai Jiao Tong University, Shanghai, China, June 27-28, 2006. P. 35-38.