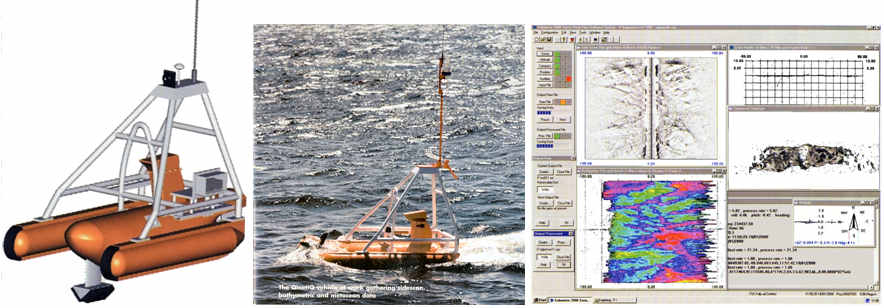
Рис. 1. Быстроходный гидрофизический модуль «Mimir», несущий на борту полный комплекс гидрографического оборудования и управляемый по высокоскоростным компьютерным каналам передачи данных
Мореходство и морские науки
Морской форум 12 февраля 2008 г
Физические основы обеспечения ходкости и живучести судов в условиях экстремального морского волнения
В. Н. ХрамушинАктуальность создания самоходных телеуправляемых гидрофизических модулей обосновывается необходимостью скорейшего воссоздания на новом техническом уровне единой системы контроля морских акваторий, способной обеспечить решение всего комплекса задач гидрографического обследования, гидротехнического контроля и краткосрочного прогноза изменения динамики морских вод, востребованных как действующим законодательством России и положениями Международного морского права, так и запросами производственных организаций, ведущих освоение морских ресурсов и обустройство побережья Дальнего Востока России.
Современная навигационная, гидрографическая и гидрометеорологическая измерительная техника претерпевает быстрое совершенствование, качественное обновление и уже способна легко вмещаться в малые габариты морской робототехники [1]. Ее использование предоставляет принципиально новые возможности для повышения эффективности мореходства и обеспечения безопасности штормового мореплавания; для обеспечения морских служб информацией о состоянии моря, в том числе необходимой для прогноза опасных морских явлений и оперативного гидрографического и гидрометеорологического обеспечения морских работ.
Экономическая оптимальность одновременного использования нескольких гидрофизических модулей, синхронно работающих в системе единого времени, в сложных и штормовых условиях плавания, где присутствие человека небезопасно или нежелательно, делает такие корабли-роботы незаменимым средством для эффективного решения задач реального мониторинга состояния морских акваторий, контроля недопустимости экологически необратимых процессов в морских водах и оперативного обнаружения потенциально опасных морских явлений с целью предотвращения аварийности или ликвидации последствий морских катастроф.
При проектировании автономных гидрофизических модулей вопросы штормовой мореходности становятся определяющими, так как для сверхмалых судов практически любое волнение на море становится подобием ураганов в отношении обычных крупных судов-прототипов.
1. Автономные корабли-роботы дальнего плавания необходимы для всепогодного присутствия в удаленных районах прибрежных морей и Мирового океана, для эффективного контроля морских акваторий наиболее экономичными техническими средствами. Обладая уникальной мореходностью в условиях интенсивного волнения, надводные корабли-роботы способны поддерживать оперативный обмен информацией по каналам дальней или космической радиосвязи. Для исключения захвата или повреждения автономного корабля при встрече с близкопроходящими морскими судами, на время акустического контакта он может погружаться под воду, поддерживая бесшумное движение вперед в режиме полупогружного или подводного судна.
2. Автоматизированные сверхмалые гидрофизические корабли, в том числе способные работать в группе под контролем с единого поста управления, необходимы для обследования судоходных фарватеров и мелководных прибрежных акваторий, обеспечивая надежную работу морского измерительного оборудования в сложных и опасных условиях плавания, где присутствие плавсредств с человеком на борту нежелательно или небезопасно.
3. Телеуправляемые самоходные гидрофизические модули малых размеров, способные проводить гидрографические изыскания в гаванях портов и прибрежных бухтах, в том числе в прибойной зоне вблизи побережья или заросших водорослями акваториях, несущие на борту комплексы измерительных датчиков, обеспечивающих анализ информации и выработку команд телеуправления на компьютере удаленного берегового или корабельного поста.
Малые надводные корабли-роботы способны создать наилучшие технические условия для работы современного электронного и измерительного оборудования, доставляя его в акватории, недоступные для гидрографических судов и промерных катеров с человеком на борту.
Использование морской робототехники в открытых морских акваториях позволяет существенно снизить стоимость гидрографических изысканий и многократно повысить их эффективность при групповом использовании малых кораблей-роботов.
Техническая реализация всех трех проектов малых кораблей-роботов основывается на использовании компактной телемеханики и вычислительной техники, современного навигационного и гидрофизического оборудования. Теоретическим обоснованием служит цикл научных исследований в области непротиворечивого проектирования формы корпуса корабля, обладающего повышенной штормовой мореходностью.
1.0. Дальность и автономность плавания, поддержание связи – без преимуществ;
1.1. Преимущества: относительно высокая скорость перехода в заданный морской район; анализ получаемых данных в походных условиях; ремонт и настройка неисправного оборудования; борьба за живучесть морского судна;
1.2. Недостатки: высокая стоимость морских работ; невозможность решения задач в сложных навигационных и в штормовых условиях плавания; опасность для людей при работе на мелководье и в прибойной зоне вблизи побережья.
2.0. Без преимуществ: непрерывный контроль состояния прибрежных акваторий;
2.1. Преимущества: дистанционный (бесконтактный) контроль состояния моря с высокоточной установкой конкретных точек измерения;
2.2. Недостатки: невозможность прямых измерений на большом удалении от берега.
3.0. Поддержание постоянной связи с берегом – без преимуществ;
3.1. Преимущества: высокая скорость хода; дистанционный контроль больших по площади морских акваторий;
3.2. Недостатки: высокая стоимость работ; зависимость от условий погоды; малая автономность и ограниченное время проведения измерений в одной точке; невозможность прямых (контактных) измерений параметров состояния поверхности моря и приводной атмосферы.
4.0. Без преимуществ: автоматическое управление движением морского робота; возможность установки на борту сложной гидрографической измерительной аппаратуры;
4.1. Преимущества: абсолютная скрытность; возможность доставки и использование сложной измерительной аппаратуры в подводном положении;
4.2. Недостатки: невозможность эффективного использования высокоточных радионавигационных систем, средств дистанционного управления и получения информации от аппарата в подводном положении; слишком малая дальность управляемого плавания при использовании кабельных или гидроакустических систем телеуправления.
Эффективность использования автономных подводных аппаратов могла бы быть значительно увеличена, если в качестве судна сопровождения будут использоваться малые надводные всепогодные корабли-роботы, обеспечивающие надежные средства навигации и связи для принципиально «слепых и немых» подводных аппаратов. В частности, для обеспечения позиционирования подводных средств надводные модули могут в автоматическом режиме расставить и затем собрать пространственно разнесенные гидроакустические маяки и связанные с ними поверхностные буи.
В качестве прототипа по функциональным возможностям и приборному оснащению можно указать автоматизированное судно-робот (Above-water Autonomous Vehicle, AAV) «Mimir AV1», представленный на рынке морских измерительных комплексов английской компанией QinetiQ [2].
«Mimir» представляет собой тримаран (рис. 1) с наибольшей длиной 3 м и шириной 1,5 м. На борту модуля установлен одноцилиндровый дизельный двигатель мощностью 9 л.с. Управление судном ведется автономно, с помощью бортового компьютера, который одновременно обеспечивает поддержание информационного обмена с береговым центром управления с помощью стандартных сетевых протоколов, поддерживаемых радиомостом для высокоскоростной передачи данных. На борту модуля используется измерительное оборудование, рассчитанное для работы на глубинах до 60 м:
– гидролокатор бокового обзора;
– измерители растворенных в воде нитратов, нитритов, фосфатов и содержания кислорода;
– CTD-зонд для получения вертикальных профилей температуры, солености и плотности воды;
– батометры для отбора проб воды;
– комплекс аппаратуры Seabird для работы с пробами воды;
– комплекс аппаратуры Seabird для анализа параметров воды в режиме in-situ;
– аппаратура для подводного и надводного видео.
Навигационное оборудование способно работать как с глобальной системой позиционирования – GPS, так и при использовании этих же приборов в дифференциальном режиме – DGPS.
Недостатком модуля «Mimir» является его низкая мореходность в условиях интенсивного морского волнения, что обусловлено слишком большой шириной корпуса тримарана. «Mimir», обладая большой скоростью хода, способен опрокинуться даже при встрече с одиночной волной от близко проходящего судна.
Более сложным аналогом надводного корабля-робота является ныряющий модуль «Glider» (Глайдер, рис. 2), использующий свою энергетическую установку только в момент подачи команды на погружение или всплытие самоходного модуля. При погружении модулю придается дифферент на нос и отрицательная плавучесть, и он, плавно погружаясь под воду, движется вперед со скоростью порядка 1 м/с. При достижении 200-метровой глубины «Glider» откачивает балласт и начинает медленное всплытие с дифферентом на корму, что опять же обеспечивает ход вперед с той же скоростью. В момент всплытия «Glider» определяет свои географические координаты, вносит поправки на дрейф и курс по компасу, затем снова программирует свое движение для нового подводного нырка на дальность порядка 2 км.
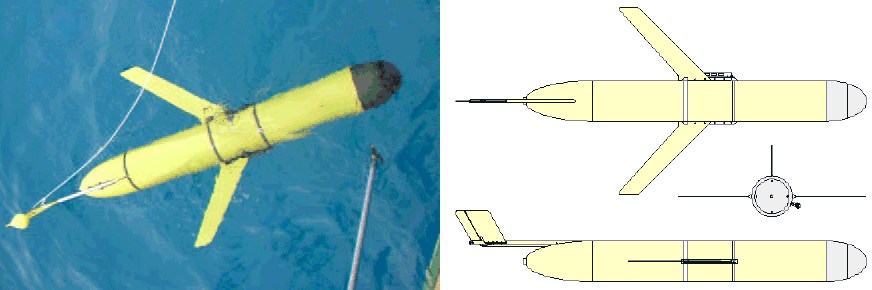
Гидрофизический модуль «Glider» [3, 4] обладает достаточной штормовой мореходностью, однако, перемещаясь в подводном положении, он утрачивает оперативные каналы связи с центром управления, на время подводного плавания полностью теряет навигационные возможности для оценки параметров собственного движения, не говоря уже об измерениях параметров динамики моря и атмосферы, что, в свою очередь, исключает возможность использования на его борту гидролокаторов бокового обзора, звуковизоров, акустических доплеровских профилографов морских течений и др.
Таблица 1.
Критерии функциональности традиционных средств контроля обстановки на море
| Тип | Дальность (самостоятельный ход в открытом море) |
Автономность (длительность мониторинга) |
Скрытность (отсутствие влияния на водную среду) |
Оперативность (быстрый откликна запросы из центра управления) |
| Надводный корабль | √√ | √√ | ×× | √√ |
| Береговой пост | ×× | ×√ | ×√ | √√ |
| Авиация | √√ | ×× | ×√ | √√ |
| Подводные аппараты | ×√ | √× | √√ | ×× |
| Дрейфующие буи | ×√ | √√ | ×√ | √√ |
| Глайдеры | √√ | √√ | ×√ | ×× |
Всепогодные надводные корабли-роботы способны самостоятельно решать широкий круг морских задач контроля морских акваторий, а их использование совместно с традиционными техническими средствами и методами контроля морских акваторий (табл. 1) может многократно повысить эффективность морских работ в целом.
Оптимальным и более надежным в эксплуатации видится использование автономного надводного гидрографического корабля, обладающего хорошей штормовой мореходностью и способного обеспечить эффективную работу всех бортовых измерительных комплексов в любых погодных условиях не только за счет активной стабилизации качки, но также за счет высокоточных измерений параметров динамики корпуса на штормовом волнении. Автономный надводный корабль сможет работать в телеуправляемом или программируемом режиме; самостоятельно или в составе группы покрывать одновременным обследованием большие по площади морские акватории, в том числе находясь под непрерывным контролем с берегового или судового центра управления.
Основу проводимых проектно-технических исследований составляет поиск новых математических моделей для определения динамики корабля, штормового моря, атмосферы и их взаимодействия, применяемых затем для оптимизации формы корпуса с позиций наилучшей штормовой мореходности. Параллельно решаются технические задачи по размещению агрегатов телемеханики, навигационного и гидрофизического измерительного оборудования; определению законов автоматического управления автономным модулем, в том числе в сложных и штормовых условиях плавания. Важнейшим мореходным качеством проектируемого сверхмалого корабля является сохранение вертикальности его корпуса, что необходимо как для устойчивой работы подводных гидроакустических средств, так и для обеспечения устойчивой радиосвязи и работы средств космической радионавигации.
Относительно невысокая скорость хода сверхмалых кораблей вполне согласуется с требованиями по работоспособности бортовой гидроакустической и гидрофизической измерительной аппаратуры. Успешное маневрирование в штормовых условиях, не может поддерживаться традиционным человеческим опытом по штормовому управлению судном. Своевременные решения о курсе и скорости хода должны приниматься бортовым компьютером автоматически с использованием специальных математических моделей, прогнозирующих динамику взаимодействия корпуса с фронтами ближайших штормовых волн (рис. 3).

Для описания внешней среды построены специальные математические модели штормового волнения с использованием эвристических подходов Кельвина для групповых структур трохоидальных волн большой высоты [5]. Поверенная хорошей морской практикой эмпирическая модель позволяет алгоритмическими методами контролировать трехмерное поле скорости в приповерхностной зоне вблизи движущегося корабля. В целом это формирует достаточный комплекс условий для решения задачи об автоматическом маневрировании корабля, где условиями оптимума могут выступать как минимальность силового воздействия крупных штормовых волн на корпус корабля, так и поиск наиболее эффективного или благоприятного для морских работ курса и скорости хода.
Использование современной высокоточной космической навигации дает прекрасные возможности для адаптации законов управления кораблем к реальной динамике корпуса на крупном морском волнении; для оптимизации условий активного хода корабля-робота с помощью заблаговременной настройки параметров автоматического управления исполнительными механизмами приборов, маршевыми двигателями, рулями и стабилизаторами качки.
Одновременно с выработкой параметров адаптивных моделей управления автономный модуль сможет выполнять анализ гидродинамического и штормового режима на поверхности моря, непрерывно доставляя результаты в удаленные морские службы по цифровым каналам радиосвязи. Именно эта информация является ключевой для оперативных морских служб, отвечающих за выработку прогнозов опасных морских явлений и обеспечивающих безопасность ведения работ и судоходства в открытом море.
Проведенные испытания оптимизированного для плавания в условиях интенсивного морского волнения гидрофизического модуля (рис. 3) подтвердили правильность выбора в качестве базовых прототипов проекты быстроходных эсминцев конца XIX – начала XX в. [6, 7, 8]. Принятый к использованию теоретический чертеж корпуса придает положительную остойчивость гидрофизическому модулю на всех углах крена, в том числе при его опрокидывании, одновременно обеспечивая возможность поддержания практически нулевой метацентрической высоты (на тихой воде на ровном киле). Округлый мидельшпангоут, острая крейсерская корма, заостренная и с очень малым надводным объемом носовая часть корпуса обеспечивают минимальное кренящее и дифферентующее воздействие морских волн на корпус корабля, придавая ему вполне приемлемую пассивную стабилизацию на волнении. Формально это означает, что остаточную качку можно успешно компенсировать с помощью активных успокоителей, расположенных в наиболее стабильном потоке за корпусом корабля – в поле действия его движителей под кормовым подзором.
Отметим все же, что автономному гидрофизическому модулю не страшны захваты волной, кратковременные погружения под гребни штормовых волн и даже опрокидывания. В этом случае произойдет кратковременное отклонение от заданного курса, что ни в коей мере не повлияет на возможность быстрого самовосстановления параметров штормового движения корабля и последующего поддержания способности к выполнению поставленных задач.
Неограниченный район плавания достигается с помощью автоматической штормовой навигации, а повышенная надежность сверхмалого гидрографического корабля обеспечивается с помощью прочного и герметичного корпуса, пассивного к воздействию морских волн и способного выдерживать удары о морское дно при движении по зыби на прибрежных мелководьях.
Для достижения ходкости и маневренности сверхмалого корабля в сложных и штормовых условиях плавания в качестве маршевых движителей планируется применение гибких малошумных плавников (рис. 4), одновременно являющихся рулями и успокоителями качки. В обоснование эффективности плавниковых движителей проводится цикл фундаментальных исследований в области построения прямых вычислительных экспериментов по моделированию и оптимизации нестационарной гидромеханики машущего крыла (НИР «Тензор», № г/р 0120.0 510049) [9, 10].
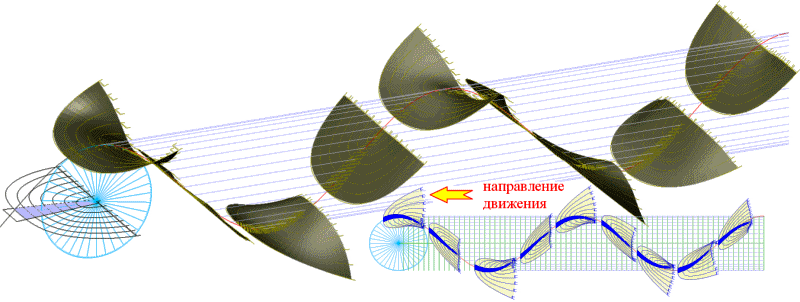
В движении жесткие ребра плавника всегда опережают упруго изгибающуюся поверхность гибкого крыла, что способствует заданной динамике вихреобразования вблизи движителя в целом. Плавниковый движитель служит и рулем, и стабилизатором качки одновременно, что достигается отклонением и искривлением средней линии плавника в процессе его рабочих раскачиваний. Плавник не теряет работоспособности при касании заиленного или заросшего водорослями морского дна, продолжая отталкиваться от него змеевидными движениями.
Наибольший технический эффект новые движители обеспечат при необходимости минимального воздействия на поверхностные воды со стороны самоходных измерительных гидрофизических модулей: при решении задач скрытности и бесшумности проведения морских гидробиологических исследований, а также в сложных условиях плавания, когда традиционные гребные винты повреждаются льдом, донными камнями или забиваются водорослями и плавающим мусором.
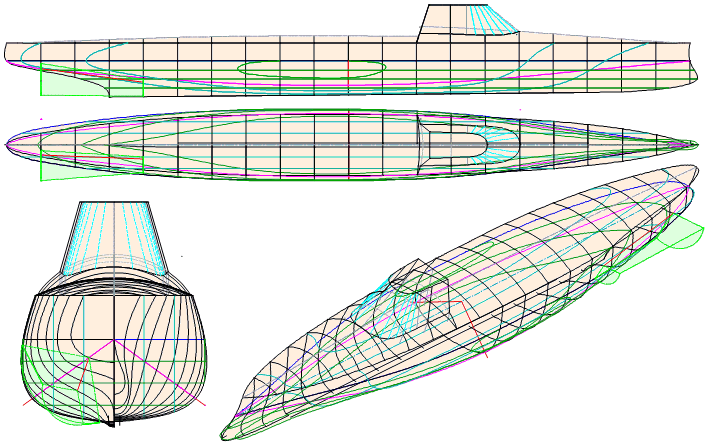
К настоящему времени проводятся исследования мореходных качеств и отработка программно-технических комплексов для двух вариантов сверхмалых автономных гидрографических кораблей [11] (рис. 5):
1) телеуправляемый самоходный модуль, обеспечивающий обследование морских и портовых акваторий с непрерывной доставкой измерительной информации по радиоканалам на единый пост управления и анализа данных, с компьютера которого подаются команды на управление двигателями, рулевыми устройствами, стабилизаторами качки и другими бортовыми механизмами самоходного модуля. Водоизмещение 20 кг при полезной приборной нагрузке 5 кг, длина корпуса 1,6 м, скорость экономичного хода 3–4 узла, автономность по запасу энергии аккумуляторов до 8 ч;
2) сверхмалый автономный корабль, способный преодолевать расстояния до 1000 морских миль под программным управлением бортового компьютера. Самостоятельно решая определенный круг задач в удаленных морских и прибрежных акваториях, такой модуль может периодически высылать сообщения о своем техническом состоянии и передавать текущую океанографическую информацию по спутниковым каналам связи. Водоизмещение 65 кг при полезной приборной нагрузке 10–15 кг, длина корпуса 2,6 м, скорость хода 5–6 узлов, автономность плавания полным ходом до 300 ч.
Окончательные технические характеристики унифицированного гидрографического корабля должны согласовываться с заказчиком и оптимизироваться в процессе разработки конкретного проекта нового корабля. В частности, за счет удорожания строительства проектируемому гидрофизическому модулю может быть придано свойство ныряющего подводного аппарата, что отчасти расширит круг задач обследования морских вод и обеспечит его безопасность при попытке захвата или при осложнениях маневрирования в условиях ураганных штормов. Длительность времени погружения под воду, в том числе с посадкой на морское дно, может определяться по команде из берегового центра управления, что может делаться в том числе для экономии ресурсов бортовой энергетической установки.
Эффективность мобильной измерительной техники может быть повышена в случае использования плавниковых движителей, обладающих повышенной надежностью и проходимостью при плавании в прибойной зоне и в сильно загрязненных или заросших водорослями акваториях [12]. Явными техническими решениями для построения таких движителей представляются естественные аналоги морской гидробионики – различные виды машущих и гибких плавниковых движителей.
Будущие испытания новых и готовых к практическому использованию гидрофизических модулей должны проводиться в реальных условиях плавания, в том числе в Охотском и Японском морях, в гаванях и бухтах Сахалина и Курильских островов. В морских испытаниях одновременно изучаются технические условия эксплуатации навигационного, гидроакустического, гидрофизического и другого измерительного оборудования, отрабатываются практические вопросы дистанционного управления сверхмалым кораблем и получения с него телеметрической информации.
Проводимые проектно-технические исследования в области сверхмалого кораблестроения опираются на современный опыт судовождения и штормового мореплавания, основанный на теоретических результатах фундаментальных исследований по оптимизации формы корпуса и общекорабельной архитектуры для достижения наилучшей штормовой мореходности корабля.
С наивысшим эффектом новые проекты сверхмалых кораблей могут быть использованы при создании современной автоматизированной системы обследования портовых акваторий, устьев рек и прибрежных мелководий, а также для охраны морских инженерных сооружений и контроля экологических процессов в открытом море и вблизи побережья. Новые разновидности плавниковых движителей обеспечат малошумность, высокую надежность и проходимость сверхмалых кораблей при работе в прибойной зоне, на мелководьях и в сильно загрязненных или заросших водорослями акваториях.
Сверхмалые гидрофизические модули, по суше доставленные на побережье, смогут обеспечить морские гидротехнические изыскания в сложных условиях ветрового волнения и прибрежной зыби на мелководьях, ныне реализуемые только в составе длительных морских и прибрежных экспедиций, время работы которых регулируется условиями погоды и гидродинамической активностью прибрежных вод при прохождении как близких, так и дальних штормов.
Сверхмалые телеуправляемые гидрографические корабли могут эффективно работать в портовых акваториях, устьях рек и мелководных заливах, в том числе в условиях плавания на интенсивно обрушающемся прибрежном волнении. Обладая высокой мореходностью и проходимостью в сложных условиях плавания, такие корабли станут незаменимыми при проведении батиметрических промеров и гидрографических изысканий в сложных в навигационном отношении акваториях.
Один или несколько одновременно работающих самоходных гидрофизических кораблей-роботов смогут наиболее экономичным и эффективным способом выполнить следующие виды морских исследований и гидротехнических изысканий:
– синхронные измерения гидрофизических параметров на акваториях портов и гаваней, в прибрежной полосе и устьях рек, в районах проведения морских работ в шельфовой зоне;
– картирование параметров состояния морских вод и построение батиметрических карт при поиске фарватеров и планировании гидротехнических работ;
– гидрографическое обследование морского дна с помощью гидролокатора бокового обзора, матричного эховизора или другой специальной сканирующей аппаратуры;
– выполнение контрольных и охранных функций на подходах к базам флота при проведении поиска подвижных и заякоренных подводных объектов;
– экологическое обследование поверхности морских акваторий, получение информации об опасных морских явлениях или контроль состояния аварийных инженерных сооружений, выполнение других морских работ, участие человека в которых невозможно, опасно или нежелательно.
1. Корытко, А. С. Исследование путей создания сверхмалого телеуправляемого корабля / А. С. Корытко, В. Н. Храмушин // Вестник ДВО РАН, 2006. – № 1. – С. 115–122.
2. Unmanned surface vehicle collects ocean data, by Simon Corfield, Technical Manager, Underwater Platforms & Systems, QinetiQ* / International Ocean System, Oct, 2001.
3. Underwater Glider Model Parameter Identification. Joshua G. Graver, Ralf Bachmayer, Naomi Ehrich Leonard (Mechanical and Aerospace Engineering, Princeton University). David M. Fratantoni, (Physical Oceanography, Woods Hole Oceanographic Institution) / Proc. 13th Int. Symp. on Unmanned Untethered Submersible Technology (UUST), August 2003.
4. D. Webb and C. Jones. Slocum electric glider layout. Technical Drawings, 2002.
5. Храмушин, В. Н. Навигационный комплекс контроля состояния моря, атмосферы и мореходности корабля / В. Н. Храмушин // Крыловские чтения. Проблемы мореходных качеств судов и корабельной гидромеханики / Сборник избранных докладов. 21–23 октября 2003 г. (6–10 декабря 2006 г.). – СПб.: Изд-во Остров, 2007. – С. 17–32.
6. Храмушин, В. Н. Поисковые исследования штормовой мореходности корабля / В. Н. Храмушин. – Владивосток: Дальнаука, 2003. – 172 с.
7. Храмушин В. Н. Исследования по оптимизации формы корпуса корабля / В. Н. Храмушин // Вестник ДВО РАН, 2003. – № 1. – С. 50–65.
8. Храмушин, В. Н. Диссертация канд. тех. наук: «Оптимизация формы корпуса корабля» / В. Н. Храмушин // Специальность: 05.08.03 – Проектирование и конструкция корабля. ДВГТУ, 2002.
9. Храмушин, В. Н. Трехмерная тензорная математика вычислительных экспериментов в гидромеханике / В. Н. Храмушин. – Владивосток: ДВО РАН, 2005. – 212 с.
10. Храмушин, В. Н. Корабль с плавниковым движителем. Заявка на изобретение: рег. № 2007133624, от 07.09.2007, Москва: Роспатент, вх. № 036721.
11. Сверхмалое автономное гидрофизическое судно / Патент на полезную модель № 51586. Заявка № 2005125544. М.: Бюл. № 6, 27.02.2006.
12. Сверхмалое автономное гидрофизическое судно с плавниковым движителем / Патент на полезную модель № 65018, заявка № 2007101994 от 18.01.2007.
(с)2007, Василий Николаевич Храмушин, канд. тех. наук, зав. лаб. вычислительной гидромеханики и океанографии СКБ САМИ ДВО РАН.