§ 4. Проработка перспективных проектов кораблей повышенной мореходности
Борьба за живучесть
Когда в океане,
Теряя плавучесть,
Ослабнув,
Не слушает судно руля -
По зову
И без
На борьбу за живучесть
Бросается весь экипаж корабля.
Бросаются все -
От старпома до кока,
И тут уж, дружище,
Себя не жалей,
Поскольку при шторме,
Схватившем жестоко,
Увы,
Судовых не распишешь ролей.
Подпоры и плечи,
Системы и спины,
Сердца и моторы
Пускаются в ход.
Волна не страшна
И бессильны глубины,
Пока наяву
На плаву пароход.
На вдруг - не надейся,
На бога - не сетуй,
Кингстоны в душе
До упора закрой.
На суше любая борьба
После этой
Покажется просто
Ребячьей игрой.
Однажды я сам
Испытал эту участь, -
Меня и потом не щадила судьба:
Кто вышел живым
Из борьбы за живучесть -
Воистину знает,
Что значит - борьба.
[Пантюхов И.М., 1975, стр 109]
|
При проектировании формы корпуса модели корабля повышенной штормовой мореходности за прототип принимаются непревзойденные по мореходным качествам обводы кораблей прошлого века. Это известные исторические миноносцы типа «Стерегущий», проходившие испытания на штормовых мерных милях, или крейсера, подобные “Варягу”, “Аскольду”, “Авроре”, и, конечно же, парусники эпохи Великих географических открытий. Столь «необычные» пожелания о проектировании формы корпуса, высказываемые морскими офицерами – преподавателями морских наук Калининградской мореходки середины 70-х годов, не только запомнились, но и послужили стимулом для многочисленных и успешных исследований мореходности исторических кораблей.
Испытания первой модели в Калининградском мореходном училище
Первые эксперименты с моделями судов с уменьшенными моментами инерции действующей ватерлинии выполнялись в 1975-1976 годах на судоводительском отделении Калининградского мореходного училища, с испытанием моделей в малом опытовом бассейне лаборатории теории и живучести корабля.

Рис. 1. Модель корпуса судна с уменьшенными моментами инерции действующей ватерлинии (МИДВ), по форме близкая к рыбе-паруснику, с носовым бульбом и плавниковым ахтерштевнем. Фотография сделана в кабинете девиации магнитного компаса судоводительского отделения Калининградского мореходного училища (1976 г). |
Задача на проектирование формы корпуса была поставлена начальником судоводительского отделения Г.С. Маленко и состояла в поиске методов обеспечения безопасности морских погрузо-разгрузочных работ, ежедневно осуществляющихся в морских экспедициях среднетоннажного рыболовного флота. Предлагалось рассмотреть вариант округлого в средней части корпуса с завалом надводного борта, что обеспечивало бы безопасную швартовку в открытом море, а также совместное маневрирование ошвартованных судов в условиях умеренного морского волнения. В качестве прототипа указывались корабли и суда конца XIX – начала XX веков.
Среди несомненных соавторов проекта новой формы корпуса модели, принявших активное участие в обсуждении ее мореходных качеств и результатов модельных испытаний, следует упомянуть преподавателей судоводительского отделения А.А. Камышева и Д.Я. Бронштейна, а также курсантов-судоводителей группы С-75 В. Богачева, Н. Нечаева, С. Лапкова и С. Борисова.
При проектировании формы корпуса требуемые свойства были усилены до крайности. Прототипом была выбрана рыба-парусник, которая по наблюдениям в открытом море демонстрировала очень малое волнообразование и высокую стабильность своего тела при плавании на взволнованной поверхности моря. В кормовой части модели был сделан тонкий плавниковый ахтерштевень, что также соответствовало форме хвостового плавника рыбы-парусника.
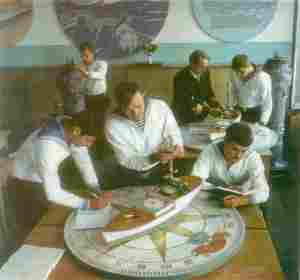
Рис. 2. Александр Алексеевич Камышев ведет практические занятия с курсантами Калининградской мореходки в том же кабинете «девиации магнитного компаса». На флоте приветствуются технические поиски будущих мореплавателей. |
Визуальные наблюдения за свободным плаванием и ходом по инерции первой модели корпуса МИДВ подтвердили правильность принятых проектных решений о форме корпуса в целом. Модель пассивно реагировала на волнение и показывала необычно высокие ходовые качества даже на закритически высоких скоростях хода. Корпус модели не получал динамического дифферента, а при его движении на большой скорости за кормой оставалась исчезающе малая или почти незаметная поперечная корабельная волна. Среди недостатков корпуса отмечалось оголение кормового подзора на высокой скорости хода, что, как полагалось, может создать неблагоприятные гидродинамические условия для работы винто-рулевого комплекса.
Рекогносцировочные опробования мореходности малой модели МИДВ
В период с 1976 по 1980 год (Калининград-Севастополь-Ленинград) было изготовлено и испытано еще несколько малых моделей судов с малой инерцией площади действующей ватерлинии, форма корпуса которых строилась в компромиссных вариантах, допускающих потенциальную возможность использования на реальных судах с такими же обводами. Однако ни показательно положительных, ни заведомо плохих результатов экспериментов с этими моделями получено не было. То есть для получения обоснованных результатов, приемлемых в практическом проектировании кораблей и судов кустарные методы уже не давали ничего качественно нового, необходимы были более глубокие и технически подготовленные исследования.
На новом техническом уровне исследования были продолжены на кафедрах гидромеханики и теории корабля кораблестроительного факультета Ленинградского кораблестроительного института. Приоритетным считалось изучение вопросов гидродинамической стабилизации корпуса при его движении на свободной поверхности с различными скоростями хода, для чего строились и проводились вычислительные эксперименты по волнообразованию с аналитически определяемыми обводами корпуса. Чисто теоретических результатов получено не было, и разработки математического обеспечения были переведены на второй план, а дополняющие опытовые эксперименты – в вычислительные.
Новая маломерная опытовая модель МИДВ была изготовлена в 1980 году, при этом обводы корпуса снова задавались по прототипу рыбы-парусника, с эскизной прорисовкой общего расположения быстроходного корабля, способного выполнять морские океанографические исследования в штормовых условиях (рис. 3). На вертикальном плавниковом ахтерштевне корабля было устроено «горизонтальное крыло», которое должно было стабилизировать поток и не допускать оголения винтов на больших скоростях хода и при движении на волнении.
Рис. 3. Проекция «корпус» теоретического чертежа и эскизная прорисовка общекорабельной архитектуры быстроходного корабля с уменьшенными моментами инерции площади действующей ватерлинии.
Впервые все шпангоуты на теоретическом чертеже корпуса модели МИДВ были прорисованы так, чтобы касающиеся их ватерлинии проходили почти эквидистантно, что, как считалось, будет соответствовать обводам биологического прототипа (как позже выяснилось, это решение было ошибочным).
При пробных буксировках модели на спиннинге в реке было получено подтверждение выполнения требования по стабилизации потока в районе движителей на всех скоростях хода. Однако выбор оптимальной скорости, на которой поперечная волна за кормой модели будет минимальной, был почти безуспешным, хотя на средних скоростях хода действующая ватерлиния модели искажалась на приемлемо малую величину.
Рекогносцировочные эксперименты были проведены в опытовом бассейне Ленинградского кораблестроительного института. В испытаниях участвовала также и вторая модель с традиционным корпусом, примерно такого же размера, что позволило сравнить результаты визуальных наблюдений за волнообразованием и сделать предварительные оценки ходовых качеств новой формы корпуса.

Рис. 4. Рекогносцировочные опытовые испытания модели МИДВ.
|
Буксировка столь маломерных моделей осуществлялась с помощью специально изготовленной уздечки, которая позволяла опустить точку приложения сил тяги на уровень палубы этих моделей. Минимальная тяга, которая могла быть задана в буксировочной системе опытового бассейна, позволяла проводить модели со слишком высокой скоростью, не менее чем Fn=0.5, однако и это вполне удовлетворяло целям рекогносцировочных опытов.
Неожиданным выводом из рекогносцировочных испытаний явилось обнаружение факта, что модель МИДВ с крыльевыми образованиями на ахтерштевне, при движении с высокой скоростью хода Fn > 0.5, теряет остойчивость, кренится и уходит с мерной линии опытового бассейна.

Рис. 5. Асимметрия корабельного волнообразования при потере остойчивости и уходе модели МИДВ с мерной линии опытового бассейна.
|
На фотографиях видно, что в носовой части модели МИДВ образуется ярко выраженная расходящаяся корабельная волна, которая свидетельствует о неудачном построении скуловых шпангоутов. Однако в опытовом бассейне не представлялось возможным провести испытания волнообразования на различных скоростях хода, и поэтому обнаруженный негативный фактор не был принят при проектировании новой более крупной модели. Дополнительные опробования в открытых водоемах также не давали возможности объективно оценить влияние формы скуловых обводов корпуса, к тому же модель показывала возможность выбора оптимальной скорости, на которой корабельное волнообразование заметно минимизировалось. Всякие опыты с моделями с заостренными ватерлиниями всегда показывали их высокую чувствительность к высоте крепления буксирной нити, модели сильно дифферентовались на больших скоростях хода, что сильно затрудняло оценки особенностей их волнообразования. Но все же наблюдения за поведением небольших моделей МИДВ на волнении подтверждали хорошие мореходные качества, такие как умеренность качки и устойчивость движения по инерции.

Рис. 6. Испытание волнообразования модели с традиционными в целом обводами, но с узким «плавниковым» форштевнем и широкой транцевой кормой. |
Вторая модель имела традиционные обводы (рис. 6), с острыми углами входа ватерлиний, образующими вертикальный «плавниковый» форштевень и переходящими в округлые скуловые обводы, обеспечивающие «закручивание» набегающего потока под днище. Широкая транцевая корма с плоским подзором удерживала корму прижатой к поверхности воды и обеспечивала стабилизацию потока в районе движителей. Теоретический чертеж традиционной модели был похож на первый вариант формы корпуса траулера, показанного в заключительной главе, но с более полным корпусом и ярко выраженными «плавниковым» форштевнем и округлыми скулами.
Традиционная модель не проявляла никаких необычных или негативных мореходных качеств. Именно эта модель ярко показывала хорошую обтекаемость и умеренно малое корабельное волнообразование в носовой части корпуса на всех скоростях хода. Основным достоинством обводов этой модели являлось отсутствие динамического дифферента на больших скоростях хода, то есть модель, разгоняясь, не образовывала перед собой волновой «горы», а ее корма заметно подвсплывала под напором потока из-под днища. Однако, при визуальных наблюдениях за поведением модели на волнении в открытом водоеме, она, как и обычное судно, демонстрировала активную качку, неустойчивость курса и быстрое гашение хода. Тем не менее, можно предположить, что при работающих движителях ход аналогичного судна на волнении будет более стабильным.
Построение теоретического чертежа большой опытовой модели МИДВ
Ко времени принятия решения о проведении сравнительных испытаний в опытовом бассейне гравитационного типа в 1985 году уже был представлен на секции кораблестроения Советского научного общества истории философии, естествознания и техники (СНОИФЕТ) доклад с основными положениями «Технико-исторического анализа мореходности», а в вычислительном центре Ленинградского кораблестроительного института была проведена серия численных расчетов волнового сопротивления с аналитическими моделями формы корпуса корабля, по результатам которых были сделаны оценки основных элементов оптимизированного корабля.
Изготовление экспериментальной модели и проведение сравнительных экспериментов в опытовом бассейне гравитационного типа проходило под руководством профессора кафедры теории корабля Александра Николаевича Холодилина. Главной задачей экспериментальных исследований ставилось подтверждение (или опровержение) выводов технико-исторического анализа мореходности.
Рис. 7. Модели судов с различным коэффициентом полноты мидель-шпангоута, испытанные в составе серии «Тейлора». Синими линиями отмечены линии тока для скоростей Fn=0.264 – корпуса слева; Fn=0.4 – удлиненные корпуса справа
Актуальность экспериментального изучения штормовой мореходности исторических судов и сопоставление результатов с современными проектными решениями по форме корпуса океанских судов обосновывалась неожиданной для всех гибелью в штормовом плавании современнейшего советского контейнеровоза «Механик Тарасов», а также появившийся в прессе вывод о незащищенности новейшего английского эсминца «Шеффилд», который на умеренном волнении не смог своевременно отреагировать на авиационную атаку в Фолклендском конфликте.
Рис. 8. Основные контуры и проекция “корпус” теоретического чертежа
модели, с которой проводились мореходные испытания в опытовом бассейне Ленинградского кораблестроительного института. Носовой бульб заглублен, а ватерлинии в его верхней части заострены, что сделано, исходя из необходимости поиска оптимальной посадки модели по ходкости на спокойной воде.
В качестве проектной последовательности получения теоретического чертежа модели МИДВ можно показать следующую цепочку трансформаций обводов корпуса. Отталкиваясь от формы корпуса современного быстроходного водоизмещающего корабля с малым коэффициентом общей полноты и развитой (развесистой) надводной частью корпуса, делается переход к корпусу крейсера типа “Аврора”. Затем такая деформация экстраполируется на усиление - гиперболизацию особенностей обводов этого крейсера, что необходимо для более четкого выявления мореходных свойств кораблей и судов, спроектированных и построенных в конце XIX века.
Это означало более существенные изменения формы корпуса по сравнению с «Авророй»: завал бортов в районе действующей ватерлинии; заужение и заострение ватерлиний в оконечностях; уменьшение надводного и увеличение полноты подводного объемов корпуса; смещение центра величины в нос и заметное снижение высоты форштевня и площади палубы бака, которые не должны препятствовать ходкости на волнении в режиме прорезания волн.
Совершенно неверно было бы говорить о новизне постановки задачи на проведение сравнительных экспериментов с моделью МИДВ, или о том, что новый корпус обладает излишней оригинальностью. В испытания серии «Тейлор» были включены модели с уменьшенной инерцией площади действующей ватерлинии как для полных корпусов большегрузных судов, так и для быстроходных кораблей с удлиненными корпусами [Павленко, 1953].
В результате этой исторической серии опытовых испытаний был сделан вывод о том, что «модели с более полной формой мидель-шпангоута обладали очень небольшим преимуществом при повышении относительной скорости до значений, превосходивших 1.10 (Fn=0.35), при этом остаточное сопротивление всех моделей было почти одинаковым» [Основы…, 1948]. С этим выводом можно вполне согласиться, если учесть, что испытания проводились до чисел Фруда порядка Fn=0.5.
Относительная длина штормовых волн, с которыми необходимо уменьшить активность силового взаимодействия за счет специальной формы корпуса, существенно больше образуемых кораблем на столь низкой скорости. Поэтому новый эксперимент планировалось провести для испытания ходкости модели МИДВ в условиях волнения и сопоставить результаты с ходкостью на тихой воде на существенно больших скоростях, вплоть до чисел Фруда порядка Fn ³
0.8 и более.
В случае формы корпуса с завалом бортов в средней части корпуса, расчеты по формулам Мичелла показывают существенное уменьшение корабельного волнообразования именно на скоростях Fn=0.5 и более. Из чего и делался вывод о том, что завал борта в районе действующей ватерлинии (точнее, в области воздействия на корпус штормовых волн) будет не только стабилизировать бортовую качку, но также благоприятно скажется на ходкости в условиях умеренного и штормового волнения.
На корпусах серии «Тейлора» видно, что линии тока у корпусов с зауженной ватерлинией обладают существенно меньшей расходимостью, чем у корпусов с малой полнотой мидель-шпангоута, у которых поток воды от форштевня устремляется в основном под днище, создавая таким образом дополнительный дифферентующий момент.
На основании указанных предположений в качестве прототипа был выбран левый нижний корпус (рис.6), который, исходя из предпосылок технико-исторического анализа, был деформирован для смещения в нос центра величины за счет развитого носового бульба (рис.7).
Вычислительная оптимизация с использованием аналитических корпусов корабля была направлена на снижение волнового сопротивления на относительных скоростях Fn=0.3 и Fn=0.5. При этом на первых этапах исследований из рассмотрения был выпущен анализ хорошо известного минимума сопротивления на Fn=0.4.
В теоретическом чертеже модели для проведения опытовых испытаний были правильно отражены проектные свойства корпуса в целом, а вот локальные обводы корпуса, чтобы усилить (не угасить) главную проектную идею, не оптимизировались даже на важных – контрольных участках бортовой обшивки. В частности, обводы носовой части корпуса остались не оптимизированными для скорости хода Fn=0.4 (не образовывали закручивания набегающего потока под днище корпуса), а кормовой подзор и раковина не создавали условий для присасывания кормы к поверхности воды на ходу корабля и соответственно не учитывали необходимость демпфирования килевой и вертикальной качки. Такая гиперболизация корпуса на изучение только его главных свойств волнообразования и взаимодействия корпуса с внешним волнением привели к тому, что в экспериментах на тихой воде ярко проявилась продольная корабельная волна, а при ходе навстречу регулярному волнению иногда отмечалась недостаточность демпфирования килевой и вертикальной качки.

Рис. 9. Испытания ходкости и волнообразования проводятся с использованием буксировочной тележки. Модель показывает слишком большую расходящуюся волну, что скрадывает на буксировочной кривой минимум на скорости хода при Fn=0.4. |
Однако указанные выше недостатки корпуса были вынужденно необходимы по той причине, что в плане испытаний ходкости на тихой воде стоял выбор оптимальной формы корпуса в зависимости от осадки и дифферента новой гипотетической модели. Чтобы при варьировании посадки корпуса не терялись его главные гидродинамические свойства, при построении теоретического чертежа модели основные ватерлинии проводились по возможности эквидистантно. Из недостатков испытываемой формы корпуса, проявлявшихся на ходкости со скоростью Fn = 0.4, позже было обнаружено относительное ухудшение штормовой мореходности, что также явилось неплохим подтверждением принципа взаимозависимости элементов формы корпуса как при достижении наилучшей ходкости на спокойной воде, так и обеспечении хорошей мореходности в условиях интенсивного штормового волнения.
Показанная на рисунке 8 модель является гиперболизованной, т.е. свойства формы корпуса несколько усилены в сравнении с перспективным проектированием реальных судов повышенной штормовой мореходности. При построении теоретического чертежа также учитывалась необходимость проведения поисковых испытаний наилучшей посадки модели по условию минимизации удельного волнового сопротивления на спокойной воде, для чего варьировались как осадка, так и дифферент модели.
Запланированный выбор оптимальной посадки по испытаниям ходкости на спокойной воде, как предполагалось, означал также определение и наилучшей формы корпуса по условиям минимизации силового взаимодействия корабля с внешним волнением (по результатам испытаний оптимальная осадка оказалась близкой к проектной или на 1÷1.5 см меньшей)
Тем не менее, в случае использования гиперболизованного корпуса МИДВ в проекте реального корабля, необходимо отметить следующие его особенности:
1. Реализуется компромиссное решение с целью обеспечения остойчивости и большого раскрытия верхней палубы, допускающих возможность установки многочисленных судовых устройств;
2. Расчетная скорость хода Fn(w) > 0.5, при этом не идет речь о соответствующей мощности двигателей. Под Fn(w)
> 0.5 понимается динамическое взаимодействие корпуса с морскими волнами, длина которых превышает длину корпуса корабля;
3. При достижении в экспериментах высоких скоростей хода, так же как в рекогносцировочных испытаниях малых моделей, может быть выявлено свойство потери остойчивости. То есть для реального судна необходимо дополнительное исследование остойчивости на ходу, а также изучение активных плавниковых успокоителей качки, которые смогут скомпенсировать потерю остойчивости;
4. Предполагается, что на верхней палубе будет минимум надстроек. Вводится большая погибь бимсов и скругление ширстрека, что должно обеспечить быстрое стекание с палубы набегающих волн;
5. Судовые устройства и оборудование, которые требуют внешнего обслуживания членами экипажа в открытом море, необходимо переместить внутрь корпуса или на кормовую палубу;
6. Снижение высоты верхней палубы в носовой оконечности служит для облегчения прорезания встречных волн. Устройства, расположенные на носовой палубе, люки трюмов, палубные механизмы и носовая надстройка прикрываются волноломом;
7. Заострение ватерлиний, которое сильно исказило реально приемлемую форму надводного борта, особенно в кормовой части корпуса, сделано с учетом сохранения ходкости и безотрывного обтекания при больших изменениях посадки судна. Это было необходимо, так как экспериментами предусматривалось изучение ходкости при различных величинах осадки и дифферента.
Испытываемая модель имела несколько гиперболизованную форму корпуса, что было необходимо для более четкого выделения как положительных, так и негативных особенностей мореходности новой оптимизированной формы корпуса.
Особенности гидростатики и остойчивости
На графиках кривых элементов теоретического чертежа хорошо видно, что даже небольшой завал бортов, приводящий к сокращению площади ватерлинии, многократно уменьшает моменты инерции площади ватерлинии, и тем самым благоприятно сказывается на снижении интенсивности силового взаимодействия корпуса корабля со штормовым волнением.
Рис. 10. Кривые элементов теоретического чертежа модели судна с уменьшенными моментами инерции площади действующей ватерлинии (МИДВ).
Остойчивость гиперболизованной модели МИДВ-85 позволяет удерживать метацентрическую высоту практически на нулевом уровне, при этом запас остойчивости будет достаточным для безопасного плавания. Минимизация начальной остойчивости означает увеличение периода свободных бортовых колебаний корпуса, что уже само по себе стабилизирует качку при воздействии морских волн с меньшим периодом. Так, при испытаниях модели МИДВ в свободном плавании на волнении, когда ее остойчивость снижалась до уровня соответствующего периоду в 6 секунд, бортовая качка практически полностью исчезла, и корпус модели всегда сохранял вертикальное положение. Максимальный период волны, генерируемой волнопродуктором опытового бассейна, не превышал величины 1.7 секунд. Аналогичные режимы плавания без бортовой качки вполне реализуемы на реальных судах с уменьшенными моментами инерции площади ватерлинии и S-образными диаграммами остойчивости на осадках, покрывающих диапазон амплитуд вертикальной качки. Период штормового волнения обычно не превышает 12 секунд, и если период качки будет доведен до 30 или более секунд, то корабль практически нигде в мировом океане не встретит крутых и опасных волн со столь большим периодом.
Параметры посадки модели МИДВ для диаграммы статической остойчивости
| N0 ВЛ |
1 |
2 |
3 |
4 |
5 |
КВЛ |
7 |
8 |
9 |
| T см |
0.5 |
2.5 |
6.5 |
10.5 |
12.5 |
14.5 |
16.5 |
20.5 |
24.5 |
| Zc см |
0.2 |
1.1 |
3.2 |
5.2 |
6.1 |
6.9 |
7.8 |
9.6 |
11.7 |
| D кг |
2.6 |
10.4 |
28.8 |
45.5 |
52.7 |
59.4 |
65.9 |
79.6 |
94.74 |
Рис. 11. Диаграмма плеч статической остойчивости формы (Zg=Zc) для модели МИДВ. На рабочих осадках корпус имеет ярко выраженную S-образность диаграмм остойчивости.
Параметры ходкости на спокойной воде и на волнении
При проектировании формы корпуса модели МИДВ и построении ее теоретического чертежа были использованы качественные результаты систематических расчетов волнового сопротивления.
Основные выводы из анализа кривых удельного волнового сопротивления сводятся к следующему:
- Необходимость заострения действующей ватерлинии в оконечностях для уменьшения удельного сопротивления при скорости хода Fn£
0.3;
- Возможность увеличения коэффициента общей полноты за счет развитого носового бульба, с сохранением малого угла входа ватерлиний в носовой части корпуса;
- Любая деформация корпуса, при которой сохраняется форма мидель-шпангоута и продольная полнота корпуса, мало сказывается на удельном волновом сопротивлении при скорости, соответствующей Fn = 0.5. К существенному снижению волнового сопротивления на этой скорости приводит уменьшение ширины и применение завала бортов в средней части корпуса, на уровне действующей ватерлинии.
Рис. 12. Расчетное распределение энергии корабельного волнообразования вдоль корпуса модели МИДВ для различных скоростей хода.
Числами на профилях волнообразования отмечены скорости движения модели по Фруду. Слева вверху показаны расчетные кривые коэффициента Сх и удельного волнового сопротивления Rx/D.
Выводы о форме корпуса, имеющей наилучшую ходкость на волнении, имеют эвристический характер, так как в истории кораблестроения, по причине огромных различий между историческими и современными кораблями, нельзя обоснованно сослаться на опыт строительства кораблей, специально приспособленных к эффективному ходу в условиях морского волнения. Теоретическая оптимизация также пока не вышла за рамки расчетов ходкости на спокойной воде.
Предположим, что если достигается минимум волнового сопротивления на любой скорости хода, включая Fn > 0.5, который будет проявляться в малом волнообразовании, то соответственно будет снижена интенсивность динамического воздействия на свободно плавающий корпус корабля со стороны морского волнения при любых длинах и амплитудах штормовых волн. Это может быть объяснено тем, что если форма корпуса в целом не усиливает корабельных волн, которые излучаются всеми участками судовой обшивки, то не должно происходить интенсивного взаимодействия со свободными морскими волнами. То есть любая свободная морская волна, которую пересекает движущийся корабль, не должна быть им разрушена, а после прохода через корпус корабля, такие свободные волны должны в целом сохранить свою форму.
Смещение центра величины и центра тяжести в нос будет ухудшать свойство «всхожести на волну», игнорирование которого необходимо для уменьшения килевой качки. Известно также [Артюшков Л.С., 1983], что именно килевая качка оказывает наибольшее влияние на потерю хода в условиях морского волнения. Исходя из используемого здесь метода анализа волнового сопротивления, можно сделать выводы о механизме снижения интенсивности взаимодействия корпуса корабля с внешним волнением, когда характер движения оптимизированного корабля в условиях волнения будет определяться исключительно гидродинамикой взаимодействия носовой части корпуса с внешним волнением.
А именно, ожидается, что уменьшение интенсивности корабельного волнообразования в носовой части корабля приведет к соответствующему снижению активности воздействия на его корпус со стороны внешнего морского волнения. Для этого обводы корпуса должны иметь сильное заострение углов входа на уровне действующей ватерлинии, и большую подводную массу (инерцию) в носовой оконечности, которая может быть обеспечена за счет установки развитого бульба. Стабилизация носовой оконечности должна привести к уменьшению всех других видов качки, а при благоприятном режиме прорезания и переката волн через верхние палубы будут исключены также и опасные «захваты» корпуса крупными одиночными волнами, и вызываемые ими перенапряжения корпусных конструкций, а также – слеминг и глубокое подныривание с ударами гребней волн по скулам и палубам.
Приняв концепцию проектирования корабля со смещенным в нос центром величины (центром тяжести) подводной части его корпуса, важно выполнить также требование по существенному уменьшению площади и моментов инерции действующей ватерлинии, и в первую очередь в носовой части корпуса. Это необходимо для согласования формы обводов корпуса с особенностями управляемости движущегося корабля, в соответствии с которыми центр бокового динамического сопротивления всегда оказывается смещенным в нос, что в совокупности может способствовать уменьшению вращательных моментов, приводящих к рысканию на курсе и килевой качке от чрезмерной всхожести корпуса на встречную волну.
Таким образом, были определены основные требования к подводной части корпуса гипотетического судна, которые должны обеспечить существенное снижение активности взаимодействия носовой части корпуса с морским волнением. Однако для полной реализации «принципа непротивления внешнему воздействию» необходимо также запрещение больших надводных объемов и излишних запасов плавучести корабля, а также недопускать развала надводного борта ни в оконечностях, ни в средней части его корпуса. Фактически же здесь сформулированы основные технические тезисы о возможности существенного уменьшения качки и улучшения ходкости корабля на волнении, обеспечиваемые за счет пренебрежения свойством «всхожести корпуса на волну», что, как затем было обнаружено в эксперименте, привело также и к существенному снижению заливаемости верхней палубы в носовой части корпуса на всех режимах и курсах движения корабля относительно интенсивного волнения. То есть уменьшение килевой качки является более эффективным средством для снижения заливаемости палубы бака в том числе.
Несмотря на гиперболизацию обводов экспериментальной модели, сделанной для более контрастного выявления особых мореходных свойств и возможных недостатков корпуса, все же, подготовленная к испытаниям гипотетическая модель вполне может удовлетворять проектным требованиям к реальному судну повышенной штормовой мореходности:
1. Удовлетворительная ходкость, как на спокойной воде, так и в условиях ураганного ветра, штормового волнения и крупной океанской зыби;
2. Улучшенная стабилизация корпуса в условиях интенсивного штормового волнения, независимо от курса и скорости хода корабля;
3. Повышенная безопасность мореплавания в любых погодных условиях, в том числе при остановленных главных двигателях.
Наиболее близкими историческими прототипами для такого гипотетического корабля могут быть признаны античные галеры с развитым носовым бульбом, которые в дальних морских походах успешно штормовали при активном использовании кормовых весел-плавников.
Сравнительные опытовые эксперименты
Цель экспериментальных исследований:
- Изучение характера, формы и интенсивности волнообразования при различных скоростях хода и посадке модели МИДВ;
- Исследование влияния формы корпуса на буксировочное сопротивление при изменении осадки и дифферента модели, а также кормой вперед;
- Проверка корректности и качественного соответствия расчетов волнового сопротивления для различных форм корпуса корабля;
- Определение дополнительного сопротивления при испытаниях модели на встречном регулярном волнении;
- Сравнение ходкости на волнении модели МИДВ и модели быстроходного судна 60-й серии с коэффициентом общей полноты корпуса d
= 0.592;
- Аналогичные сравнительные испытания размаха килевой качки и ускорений в оконечностях корпуса на встречном регулярном волнении;
- Определение величины потери хода и характеристик качки на встречном волнении кормой вперед;
- Исследование ходкости и динамики качки модели на попутном волнении, и в том числе испытание режимов захвата корпуса попутной волной;
- Визуальные наблюдений за мореходными качествами и обеспечением условий безопасности мореплавания модели на регулярном волнении в свободном плавания без хода и на малой скорости в волновом дрейфе или по инерции.
Программа и условия ходовых и мореходных испытаний
Сравнительные испытания ходкости и мореходности моделей судов проводились в опытовом бассейне гравитационного типа Ленинградского кораблестроительного института с 3 декабря 1985 года по 12 января 1986 года. Длина бассейна 36 м, ширина 5.5 м, наибольшая глубина 3м. Объектами экспериментальных исследований являлись три модели водоизмещающих судов:
1. Эталонная модель судна «Виктори» (M: 1:45):
| Длина по ватерлинии |
L = 3.012 м; |
| Ширина |
B = 0.42 м; |
| Осадка |
Т= 0.194 м; |
| Водоизмещение |
D = 165 кг; |
| Площадь смоченной поверхности корпуса |
S = 1.821 м2; |
| Коэффициент общей полноты |
d = 0.675; |
| Коэффициент полноты действующей ватерлинии |
a = 0.740. |
2. Модель быстроходного судна 60-й серии (M: 1:70):
| Длина по ватерлинии |
L = 2.1 м; |
| Ширина |
B = 0.295 м; |
| Осадка |
Т = 0.125 м; |
| Водоизмещение |
D = 44.3 кг; |
| Площадь смоченной поверхности корпуса |
S = 0.776 м2; |
| Коэффициент общей полноты |
d = 0.572; |
| Коэффициент полноты действующей ватерлинии |
a = 0.744. |
3. Модель корабля с уменьшенными моментами инерции площади действующей ватерлинии и со смещенным в нос центром величины подводного объема (МИДВ):
| Длина |
(Max, KWL, ^^) |
L = 2.6, 2.32, 2.2 м; |
| Ширина |
(Max, KWL, Deck) |
B = 0.32, 0.2133, 0.232 м; |
| Осадка |
(Max,ÉQÌ |
Т = 0.16, 0.145 м; |
| Высота борта |
(Max,ÉQÌ |
H = 0.31, 0.275 м; |
| Водоизмещение |
|
D = 59.4 кг; |
| Площадь смоченной поверхности корпуса |
|
S = 1.113 м2; |
| Коэффициент общей полноты |
|
d = 0.827. |
Целью испытаний второго этапа являлось исследование ходкости и качки модели МИДВ в условиях тяжелого и умеренного волнения. Для возможности сопоставления мореходных свойств новой модели методом исследования был выбран сравнительный анализ результатов аналогичных испытаний модели быстроходного судна 60-й серии с коэффициентом общей полноты d = 0.572. Среди современных мореплавателей суда с такими характеристиками и формой корпуса определяются как обладающие превосходными мореходными свойствами в условиях штормового волнения.

Рис. 13. Испытание модели судна 60-й серии с использованием гравитационной буксировочной системы. |
Характеристики модели МИДВ, установленные для выполнения мореходных испытаний на волнении: LWL=2.32 м; D=55.1кг; BWL=0.213; S=1.05м2; T=0.15 м; d=0.802.
Буксировка моделей осуществлялась с использованием гравитационной системы, позволяющей проводить испытания в условиях наиболее приближенных к реальному плаванию на волнении, когда скорость судна зависит не только от тяги двигателей, но и от характера взаимодействия корпуса с внешним морским волнением. В частности, в экспериментах на волнении можно было наблюдать кратковременные остановки модели и даже - обратный ход.
Для исключения ходового дифферента, возникающего под действием момента сил сопротивления и тяги, было изготовлено специальное приспособление к упряжке гравитационной системы, состоящее из Г-образного рычага, с помощью которого точка приложения силы тяги была перенесена на уровень центра величины подводной части корпуса модели МИДВ.
Рис. 14. Схема упряжки модели МИДВ в гравитационной системе опытового бассейна, с переносом точки приложения тяговой силы на уровень ниже ватерлинии. (1) - вертикальная штанга; (2) - горизонтальный рычаг; (3) - площадка для крепления упряжки в центре тросового ромба; (4) -степс на прочном киле внутри корпуса модели с поперечной осью для крепления Г-образного рычага; (5) -гировертикаль; (6) - флажок для отметки времени прохождения мерного отрезка пути.
Непосредственно перед началом испытаний ходкости на волнении для каждой модели строились буксировочные кривые сопротивления движению на спокойной воде, при этом на моделях было уже смонтировано все оборудование, используемое для испытаний на волнении.
Тарировка волнографа проводилась два раза за смену, тарировка гировертикали – по одному разу для каждой модели после завершения всех испытаний на волнении.
Регулярное волнение создавалось с помощью штатного механического плунжерного волнопродуктора, которым оснащен опытовый бассейн Ленинградского кораблестроительного института. При испытаниях устанавливались следующие характеристики волнения:
- Амплитуда волны: А = 0.15, 0.075 м;
- Длина волны: l = 1.0, 2.137, 2.934, 4.0 м.
- Максимальная амплитуда: А=0.15 м. больше осадки модели МИДВ на 15 мм и больше осадки модели быстроходного судна 60-й серии на 25 мм.
Третий этап испытаний заключался в визуальном наблюдении за поведением модели МИДВ на регулярном волнении в условиях неуправляемого движения по инерции и свободного плавания под действием волнения и волнового дрейфа. На волнопродукторе выставлялась предельно максимальная амплитуда волн, длина которых определялась при подготовке конкретного экспериментального наблюдения. В частности, была сделана попытка приведения судна в аварийное состояние, связанное с опрокидыванием или жестким захватом корпуса гребнем волны.
По наблюдениям за свободным плаванием на волнении проверена корректность основных выводов из технико-исторического анализа мореходности кораблей и судов, строившихся в прошлые века, и форма корпуса которых наиболее близко соответствует новой модели МИДВ.
Удержание модели на месте и придание ей импульса свободного движения по инерции осуществлялось вручную, с технологического мостика над поверхностью воды. При подготовке модели к испытаниям третьего этапа, весь балласт расклинивался или приклеивался к внутреннему набору корпуса, а палуба герметично задраивалась. Для контроля положения модели внутри опытового бассейна на ее палубе, в районе 3-го и 16-го шпангоутов, были закреплены два 5-метровых конца из капроновых нитей. Этими нитями задавался курс модели относительно фронтов волн, предупреждались удары корпуса о борта и арматуру опытового бассейна.
Для проверки возможности самостоятельного выхода неуправляемой модели на курс носом на волну задавались три режима: l = 1 м, A = 0.13 м; l = 2.5 м, A = 0.18 м; l=4м, A = 0.2 м. В остальных случаях использовался режим с длиной волны, равной длине модели, и амплитудой, равной ее высоте борта: l = 2.6 м, A = 0.2 м
Сопоставление ходкости модели МИДВ с моделями традиционных судов
Рис. 15. Сравнительные кривые коэффициентов остаточного сопротивления моделей. 1. Эталонная модель «Виктори»; 2. Модель 60-й серии; 3. МИДВ, осадка: Т=135 мм; 4. - Т=125 мм; 5. -
DТ=40 мм на корму; 6. -
ход кормой вперед; 1÷3- испытание в гравитационной системе; 4÷6. - на буксировочной тележке.
При расчетах сопротивления трения эквивалентной пластины использовалась стандартная формула ITTC-57: 
Наилучшая ходкость модели МИДВ достигалась при оптимальной посадке: Т=125мм; DT=20 мм на корму. Экспериментально минимум удельного остаточного сопротивления был обнаружен на осадке, соответствующей максимальному завалу бортов ( на уровне точки перегиба контура мидельшпангоута).
Полностью подтверждены результаты численных расчетов волнового сопротивления, прогнозировавших улучшение ходкости на больших скоростях хода при Fn≥=0,5, которое достигается за счет завала бортов и уменьшения ширины действующей ватерлинии в средней части корпуса.
Рис. 16. Удельное остаточное сопротивление моделей. 1. «Виктори»; 2. 60-й серии; 3. МИДВ, Т = 135 мм; 4. МИДВ при оптимизированной посадке: Т=125мм; DT=20мм на корму. 1÷3- испытание в гравитационной системе; 4 - на буксировочной тележке.
На осциллограммах волнографа подтверждалось, что максимальная высота корабельной волны соответствует скорости хода Fn»0.5, затем высота волны начинает уменьшаться, что объясняется стабилизацией динамической посадки корпуса за счет завала бортов в средней его части, в районе действующей ватерлинии (эффект «антиглиссирования», или погружения).
В вычислительных экспериментах по минимизации волнового сопротивления показывалось, что экстремумы на буксировочных кривых должны сохраняться, если они представлены в виде удельного сопротивления, отнесенного к водоизмещению модели. Поэтому сравнение мореходных качеств выполнялось именно в удельных сопротивлениях, которые разбивались на 3 группы: RX / D
£ 0.1 [Н/кг] – средний ход; RX / D
£ 0.2 – полный ход; RX / D
£ 0.3 – форсированный ход.
Ходкость на волнении в зависимости от тяги движителей
Результаты испытаний ходкости на волнении удобнее всего представить в виде графиков потери хода моделей МИДВ и быстроходного судна 60-й серии. Аргументом выбрана относительная длина волны, соразмеренная с длиной корпуса испытываемой модели l = l / L, где длина волны
l вычисляется по периоду времени одного такта волнопродуктора: l = g·T2/2p, что следует из дисперсионного соотношения для волн на глубокой воде:
w2 = g·k, w = 2·p / T, k = 2·p /
l.
Величины потери хода на волнении сняты с буксировочных кривых и соотнесены со скоростью моделей на тихой воде:DV = ( Fno
– Fnв ) / Fno, где L – расчетная длина корпуса испытываемой модели; Fnо – скорость по Фруду на спокойной воде; Fnв– скорость буксировки модели с той же тягой на волнении
Рис. 17. Сравнение величин потери хода на волнении модели с корпусом МИДВ (черные кривые) и модели быстроходного судна 60-й серии с d=0.572 (синие кривые).
На каждом рисунке приведено по две пары кривых для модели МИДВ и модели 60-й серии, одна соответствует амплитуде встречной волны равной осадке модели АВ = 15 см и половине осадки АВ = 7,5 см.
1. Форсированный ход – соответствует форсированному ходу военных кораблей или предельной ходкости быстроходных транспортных судов (верхний рисунок);
2. Полный ход. Главные двигатели работают в расчетном режиме, соответствующем экономичному ходу (средний рисунок);
3. Средний ход. Обычный режим плавания в условиях хода на крупном волнении или штормования (нижний рисунок).
Оценка ускорений в оконечностях моделей по отношению к динамике жидкости в гребне волны
Рис. 18. Интенсивность килевой качки в зависимости от скорости
хода в различных условиях встречного регулярного волнения с нормировкой на вертикальные ускорения частиц жидкости в гребне волны. Левый рисунок для модели МИДВ, правый – 60-й серии.
На рисунке 18 представлены величины ускорений в оконечностях корпуса, обезразмеренные по величине WB= w2·A = 4p2·A/T, представляющей максимальные ускорения для частиц жидкости на свободной поверхности в гребне прогрессивной штормовой волны. В случае обрушающегося гребня, ускорение в гребне волны достигает g – ускорения свободного падения.
При построении рисунков учтена осредненная (или средне-стабильная) амплитуда килевой качки. Максимальный же размах килевой качки иногда в полтора раза больше, а в некоторых случаях всплески в записях бортового гирогоризонта в два раза больше осредненных.
По результатам буксировочных испытаний на волнении можно сделать вывод, что судно с уменьшенными моментами площади действующей ватерлинии в целом обладает лучшей ходкостью по сравнению с традиционным быстроходным судном. Особенностью нового корпуса является также то, что в самом опасном режиме плавания, когда длина штормовой волны равна длине корпуса, возможно поддержание высокой скорости хода.
Уменьшение динамического взаимодействия корпуса с морским волнением, отдаление резонанса на более низкие частоты собственных колебаний корпуса по всем видам качки способствовали существенной стабилизации корпуса (1.5-2.5 раза) в сравнении с аналогичными параметрами качки традиционного быстроходного судна (с малым коэффициентом общей полноты корпуса). Возможно, что и остаточную килевую качку можно уменьшить с помощью традиционных активных (жидкостных или крыльевых) успокоителей, так как в экспериментах с моделью МИДВ практически не наблюдалось резких движений корпуса под воздействием «ударов» встречных волн. Соответственно, созданные с помощью новой формы корпуса условия для работы активных успокоителей продольной качки (в виде горизонтальных рулей или насадок на гребных винтах) не только повысят комфортность обитания экипажа при ходе судна на умеренном волнении, но и, будучи задействованными в качестве активной системы позиционирования, смогут улучшить плавность хода, повысить эффективность маневрирования, а также обеспечить безопасность плавания в условиях ураганных штормов.
Анализ выполнения проектных требований к модели с малой инерцией действующей ватерлинии
1. Ходовые испытания на тихой воде
Модель МИДВ показала лучшие ходовые качества, по сравнению с моделями с традиционными обводами, что справедливо в интервале скоростей, характерных для режима плавания военных кораблей или быстроходных транспортных судов.
Выводы из формального анализа буксировочных кривых говорят о том, что модель МИДВ с d = 0.827 показывает лучшие ходовые качества на спокойной воде, чем модель быстроходного судна 60-й серии с
d = 0.572, при этом несколько уступая ей на числах Фруда от 0.36 - до 0.41, что обусловлено специальным проектированием носовых обводов модели МИДВ, допускающих сравнение ходкости при разной посадке модели. Если же проводить сравнение с формой корпуса эталонной модели «Виктори» с d = 0.675, имеющей примерно сходные основные характеристики формы корпуса, то преимущество нового корпуса на экономичных скоростях хода Fn=0.27÷0.37, можно назвать существенными.
Улучшение ходовых качеств обнаружено также при дифферентовке модели МИДВ на корму. Это говорит о том, что погружение носового бульба по отношению к заглублению бортовых булей на мидель-шпангоуте неоправданно и будет ошибкой при разработке теоретического чертежа реального корабля.
Качественный анализ кривых остаточного сопротивления подтверждает результаты численной оптимизации формы корпуса по волновому сопротивлению, выполненной с использованием формул Мичелла. В расчетах для модели МИДВ прогнозировалось значительное снижение волнового сопротивления на скоростях хода меньше, чем Fn=0.32. Это подтверждалось всегда, независимо от осадки модели. Экспериментально подтверждено также некоторое увеличение сопротивления на скорости Fn»0.4, которое проявлялось как смещение минимума сопротивления от точки на Fn»0.35, к точке Fn»0.32.
Хорошие ходовые качества модель МИДВ показала при буксировке кормой вперед. В этом случае, несмотря на большую смоченную поверхность (»30%), в сравнении с моделью судна 60-серии, полное удельное сопротивление модели МИДВ было меньше на любых скоростях хода. При оценке удельного остаточного сопротивления на скорости Fn»0.4, также были получены хорошие результаты, что объясняется отсутствием эквидистантных ватерлиний и шпангоутов в кормовой части корпуса.
Из анализа кривых сопротивления следует вывод, что модель МИДВ нуждается в дальнейшей доработке формы корпуса:
1. Необходима доработка формы корпуса для обеспечения (восстановления) минимума волнового сопротивления на скорости хода Fn=0.4;
2. Коэффициент общей полноты модели при необходимости может быть значительно увеличен, что дополнительно снизит полное удельное сопротивление без особо сильного влияния на волнообразование;
3. Для дополнительной минимизации полного сопротивления может быть уменьшена смоченная поверхность корпуса.
Рекомендации к изменению теоретического чертежа разрабатывались с использованием геометрической картины волнообразования, построенной с помощью теории корабельного волнообразования Мичелла.
В эксперименте с моделью МИДВ на осадках, близких к проектной, наблюдалось почти полное отсутствие поперечных корабельных волн за кормой, на любых скоростях движения. Из этого следует вывод, что с позиций интерференции волнообразования форма корпуса модели МИДВ близка к оптимальной. Расходящаяся же волна, особенно на скоростях движения Fn»0.35¸0.5 была чрезмерно большой, что привело к увеличению волнового сопротивления на скорости Fn»0.4.
2. Ходовые испытания на волнении
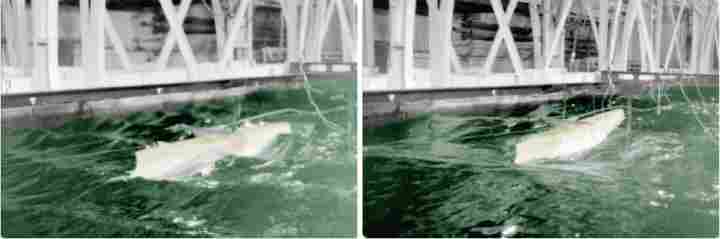
Рис. 19. Испытание ходкости модели на регулярном волнении с использованием гравитационной тяги воспроизводит реальное поведение корабля, в том числе в наиболее жестких условиях штормового волнения.
Ходовые испытания на регулярном волнении в основном показали улучшение мореходных качеств модели МИДВ, по сравнению с быстроходным судном 60-й серии. Это проявлялось в значительном уменьшении амплитуды килевой качки, увеличении ее периода и в значительно меньших потерях хода
Успешно удовлетворено требование к модели МИДВ, касающееся взаимодействия корпуса с волнением, и в эксперименте можно было наблюдать, что встречные волны модель МИДВ оставляет за кормой почти недеформированными. Замечено, что продольная качка модели МИДВ происходит вокруг оси, лежащей вблизи форштевня, вследствие чего носовая часть корпуса была всегда хорошо стабилизирована, а также всегда обеспечивалось условие незаливаемости верхней палубы, в отличие от модели 60-й серии, высокий форштевень которой способствовал усилению килевой качки и, как следствие, интенсивной заливаемости высокоскоростными гребнями встречных волн.
При буксировке модели МИДВ кормой вперед наблюдалось значительное усиление килевой качки, хотя амплитуда ее не превосходила амплитуду качки модели 60-й серии. Последнее объясняется ухудшением мореходности в случае больших надводных объемов в носовой части корпуса. Но из-за уменьшенной площади действующей ватерлинии качка не была сильнее, чем у модели из серии 60.
Модель 60-й серии при испытаниях на длине волны, равной длине корпуса, и амплитуде, равной половине осадки, при буксировке с минимальной силой тяги неожиданно потеряла ход, при этом резко возросла килевая качка, а возникший параметрический резонанс привел к сильному рысканию и разрушению палубных креплений модели в упряжке гравитационной системы. Дальнейшие испытания модели 60-й серии в этом режиме волнения были прекращены, несмотря на то, что проведенные ранее на той же длине волны, но с большей амплитудой, не приводили к аналогичным аварийным ситуациям. При испытаниях модели МИДВ таких же неблагоприятных режимов качки обнаружить не удалось, несмотря на то, что после аварии модели 60-й серии был произведен специальный поиск опасных режимов плавания.
При движении по волне с минимальной тяговой силой модель МИДВ легко “подхватывалась” и шла со скоростью волны. Однако при этом не наблюдалось тенденций к рысканию или уходу с курса с резким поворотом, которые в случае традиционных судов грозят сильным накренением или опрокидыванием.
3. Наблюдения за свободным плаванием модели МИДВ на волнении
После окончания первого этапа испытаний проводились испытания модели МИДВ в свободном плавании на волнении. Ставилась цель: выявить, выходит ли модель самостоятельно на курс носом на волну. Для этого была выбрана проектная посадка, и варьировались характеристики остойчивости и параметры волнения. Амплитуда волн всегда назначалась предельно максимальной, которую допускал плунжерный волнопродуктор опытового бассейна.
Самопроизвольного выхода модели МИДВ на курс носом на волну обнаружено не было. Корпус не стремится встать лагом к волне и всегда уходит из этого положения, вставая под углом »45° к фронту, обычно кормой на волну.

Рис. 20. К корпусу модели, находящейся в свободном плавании без хода, приближается большая волна с предельной амплитудой и разрушающимся в ее вершине гребнем. В следующий момент времени, вблизи корпуса модели с заваленным бортом, амплитуда этой волны уменьшится, волна начнет перетекать под днищем на другой борт без особо сильной деформации, а модель сохранит свою пассивность и не проявит каких-либо резких движений под воздействием этой гидродинамически правильной прогрессивной волны. |
Второй этап аналогичных экспериментов по обнаружению опасных режимов аварийного плавания был проведен после окончания заключительно этапа ходовых испытаний на волнении. Сначала было проведено несколько прогонов модели на попутном волнении при длине волны, равной длине корпуса и имеющей максимально допустимую амплитуду (Аволны=20см, при этом волны, ударяясь о стенку, выплескивались из бассейна). Ожидалось, что в случае «захвата» корпуса попутной волной, модель может быть серьезно повреждена или разрушена. Однако, модель легко подхватывалась и шла со скоростью волны, остойчивости не теряла, и не проявляла стремления к рысканию или уходу с курса.
Затем проводились наблюдения за свободным плаванием модели на этом же волнении при варьировании дифферента и начальной остойчивости. При уменьшении остойчивости, после загрузки балласта на палубу, бортовая качка практически исчезла, модель перестала крениться на сильном волнении. Это обусловлено тем, что собственный период бортовой качки модели достигал TM = 6 секундам, а период волнения был существенно меньше - TW = 1.21 секунды. Снова наблюдалось пассивное отношение модели к курсу относительно фронта волн.
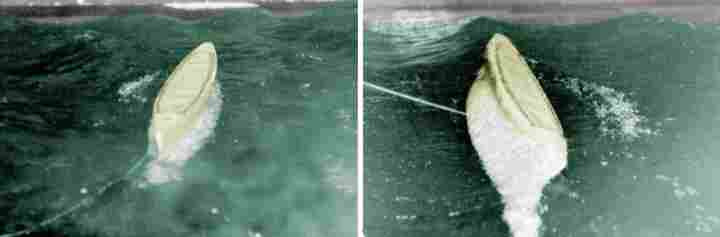
Рис. 21. В случае удара волны о борт судна (резонансное раскачивание корпуса с высокой начальной остойчивостью), находящегося в положении лагом к волне, усиления качки не происходит, что обусловлено ярко выраженной S-образностью диаграммы остойчивости и связанной с этим нелинейностью бортовой качки.
На фотографиях (Рис. 21) видно, что волны проходят через корпус, не претерпевая сильных искажений своей формы. Удалось также зафиксировать момент “удара” корпуса о волну, при котором резонансного усиления амплитуды бортовой качки не произошло. После уменьшения чрезмерной начальной остойчивости столь интенсивного взаимодействия модели МИДВ с волнением больше не наблюдалось.

Рис. 22. Свободное движение модели навстречу волнению. Рыскания, килевой качки и ухода с курса не проявлялось.
На фотографиях (Рис. 22) показано положение модели в движении по инерции навстречу волне. В этом режиме плавания она долго сохраняла курс и скорость, даже при длине волны, равной длине корпуса. Модель начинала уходить с курса только после полной остановки, в процессе дрейфа по волне. Можно сделать вывод, что такому судну будет легко удержаться на штормовом курсе при работающих движителях.
В свободном дрейфе модель выходит на курс »45° к фронту кормой на волну. При придании импульса движения по волне модель не останавливалась и не стремилась к быстрому уходу с курса, даже если захвата волной не происходило. Создается впечатление, что, несмотря на малую скорость хода в режиме эпизодического захвата корпуса попутной волной, сил на рулях будет достаточно для удержания судна на курсе по волне даже при остановленных двигателях.
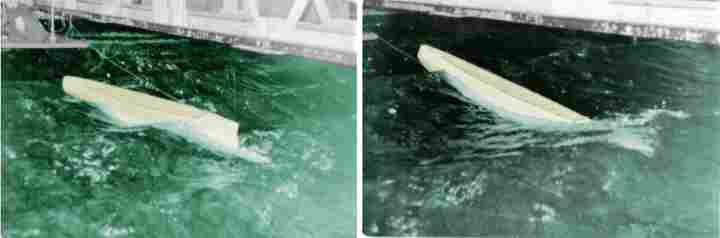
Рис. 23. Свободное плавание по волне и захват корпуса попутной волной.
При попытке развернуть корпус из положения лагом к волне на курс носом на волну с помощью нити, закрепленной на палубе в районе 3-го шпангоута, было обнаружено, что центр действия сил дрейфа находится ближе к форштевню. Это подтвердилось, когда при подтягивании модель стала приближаться кормой вперед. По срыву волновых потоков с верхней кромки выдающегося вперед бульба было сделано предположение, что в смещении центра бокового сопротивления в нос принимает участие бульб также и тем, что тормозит вершину волны, в которой наблюдается максимальная скорость волнового потока. Это означает, что заостренный в верхней части и выступающий вперед бульб, не позволяет модели самостоятельно выйти на курс носом на волну.
Наблюдения за свободным плаванием оптимизированной модели на взволнованной поверхности опытового бассейна позволили сделать только предварительные технические замечания об особенностях оптимизированного по условиям безопасности штормового плавания корабля без хода, которые, тем не менее, не выявили противоречий между стремлением к наилучшей штормовой ходкости и стабилизации корпуса, и безопасности штормового плавания аварийного судна.
В проведенных экспериментах с гипотетической моделью было выявлено, что сильно зауженная корма хорошо проявляет себя при испытаниях безопасности плавания на крупном волнении без хода, что было обусловлено пассивностью корпуса относительно курса на волнении и не выявляло противоречий с проектной концепцией корпуса, как “флюгера на волнении”.
Модель МИДВ, имеющая далеко выдвинутый вперед бульб и нависающую над водой корму, не проявила свойств флюгера и не проявляла активного стремления к выходу на курс носом на волну. В реальных штормовых условиях на корпус корабля будут оказывать влияние давление ветра и вызываемое ветром и нелинейными процессами в гребнях волн сильное дрейфовое движение корабля. При возникновении движения должно проявиться смещение в нос центра бокового сопротивления, которое при парусящей на ветру и под ударами гребней волн кормовой части корпуса создаст необходимый момент для выведения корабля на курс носом на волну.
Выявленные недостатки в проекте формы корпуса модели МИДВ
При проектировании модели корпуса для ходовых и мореходных испытаний, надводные объемы в кормовой части корпуса были слишком сильно уменьшены, что требовалось как для ее испытаний в широком диапазоне осадок, так и для обеспечения испытаний мореходных свойств модели на заднем ходу (режим плавания с хорошей всхожестью на встречную волну).
Такой метод интерференционного снижения волнового сопротивления на тихой воде предлагался Я.И. Войткунским в книге «Сопротивление воды движению судов» [1964]. В некоторых случаях модель действительно показывала хорошую ходкость на курсе кормой вперед, однако при плавании на волнении корпус испытывал усиленную килевую качку, грозящую сорваться в параметрический резонанс, что делало невозможным столь же полное проведение мореходных экспериментов (в случае параметрического резонанса, при сильном рыскании и бортовой качке вырываются крепления корпуса в упряжке гравитационной системы).

Рис. 24. Проверка влияния уменьшения полноты скуловых обводов
на форму корабельного волнообразования. На верхнем рисунке скорость соответствует Fn≈0,3, на нижнем Fn≈0,7. По-видимому, в этом эксперименте принципиально изменился характер образования расходящихся корабельных волн.
|
К сожалению, эта особенность формы кормовой раковины сказалась и на ходкости модели в условиях длинных (длиннее корпуса) волн, так как уменьшенные объемы и продольная симметрия надводной части корпуса не обеспечивали должного удержания кормового подзора вблизи поверхности воды, а из-за отсутствия нелинейного демпфирования иногда возникала усиленная вертикальная качка.
Соответственно килевая качка, у которой центр вращения сохранял стабильное положение в носовой части корпуса, приводила к необоснованно большим вертикальным размахам уровня воды в районе кормового подзора. Однако последнее не является неустранимым недостатком проекта, так как восстановление «нависающего над водой» кормового подзора с увеличенным надводным объемом в любом случае требуется с целью стабилизации потока и предотвращения оголения винто-рулевого комплекса.
Стабилизация корпуса на волнении
Вышеуказанные свойства формы корпуса, оптимизированного по волновому сопротивлению на спокойной воде, в основном положительно сказались на стабилизации корабля, как движущейся платформы в штормовом море. Уменьшение площади и моментов инерции действующей ватерлинии, с сохранением массовых моментов инерции, привело к существенному увеличению периодов собственных колебаний корпуса.
В исходных гипотезах заложено, что для недопущения интенсивного отражения морской волны от бортовой обшивки корпуса, в процессе которого возможна передача волновой энергии на опасное усиление рыскания и качки корабля, необходимо оптимизировать волновое сопротивление на всех скоростях хода, включая высокоскоростные режимы с числами Фруда Fn³0.5, на которых происходит образование корабельных волн с такими же параметрами, как и внешнее морское волнение.
Эта задача решалась численным моделированием волнового сопротивления с использованием формул Мичелла. При этом детальная физическая интерпретация подынтегральных выражений Мичелла позволяет не только провести уточненные расчеты волнового сопротивления, но также, по результатам геометрической интерпретации формы локального волнообразования, уточнить форму шпангоутов для локальных участков судовых обводов, в первую очередь в районе носовой скулы и в корме, в зоне отрыва потока. Аналогичные исследования ранее выполнялись Г.Е. Павленко в книге «Сопротивление воды движению судов» [1953], в которой также проводилась физико-геометрическая интерпретация корабельного волнообразования с целью отработки элементов судовой поверхности, которые способствовали бы уменьшению интенсивности трансформации волн при их взаимодействии с корпусом.
Корабль не может образовывать очень короткие корабельные волны. Они либо разрушаются вблизи расходящихся ветвей носовых ватерлиний, когда угол наклона поверхности воды превышает критический для стоячей волны (60°), либо увеличивают свою длину по мере накопления избыточной энергии на фронте волны с превышением критического наклона для свободной прогрессивной волны Герстнера (30°).
Поэтому нет оснований для введения в обводы корпуса сильно искривленных ватерлиний. Но все же важнейшим и исторически оправданным методом ослабления энергии взаимодействия с короткими волнами, что необходимо для предотвращения резких ускорений при бортовой качке, является завал бортов в средней части корпуса, и в том числе на уровне действующей ватерлинии. Снижение интенсивности ударов волн о корпус корабля должно достигаться также за счет исключения нависающего над водой форштевня, чрезмерно больших нависающих над водой надводных объемов в кормовой части корпуса, а также максимально возможным заужением ватерлиний в оконечностях. Это не означает обязательного уменьшения объемных коэффициентов полноты формы корпуса, которые могут быть существенно большими за счет дополнительных подводных объемов в носовой части корпуса (грузовые отсеки), и надводных – в кормовой (помещения для экипажа, аппарели для горизонтальной погрузки и других отсеков для легких и объемных грузов).
Форма корпуса и архитектура перспективных кораблей и судов
Методы пассивной стабилизации корпуса путем построения красивых обводов и скромного внешнего облика корабля имеют хорошо известные исторические прототипы, это корабли и суда конца XIX и начала XX веков, обладавшие строгим однообразием проектных решений по форме корпуса и схемам общего расположения палубных надстроек. Именно в те годы к кораблям предъявлялись наиболее высокие требования по обеспечению безусловно высокой штормовой мореходности, что одновременно положительно сказывалось на всех других эксплуатационных и боевых качествах океанских кораблей в целом. Повышение критериев функциональности имеет особую значимость для научно-исследовательского, спасательного и военного флотов, которые обязаны иметь высокий уровень мореходности, в том числе в сложных условиях штормового плавания.

Рис. 25. Крейсер II ранга «Новик» эскадры Тихого океана 1904 г
|
Для современного корабля, оснащенного сложными комплексами гидроакустической и радиоэлектронной аппаратуры, стабилизация корпуса на волнении становится ключевым требованием, обусловливающим маневренность корабля и эффективность использования его вооружения. В частности, общее снижение интенсивности килевой качки крайне необходимо для обеспечения стабильности потока в районе гидроакустических антенн, установленных в носовом бульбе или в подкильных гондолах. И только пассивное снижение всех видов качки на волнении за счет специальной формы корпуса корабля может позволить эффективно применять активные средства стабилизации, что крайне необходимо, например, спасательному флоту, обязанному уверенно маневрировать в непосредственной близости у борта аварийного судна.
Для решения поставленной задачи могут быть использованы как чисто проектные или эвристические подходы, так и математические методы построения формы корпуса, позволяющие минимизировать интенсивность силового взаимодействия между кораблем, волнением и ветром. Только после глубокой пассивной компенсации широкого спектра штормового волнения, дестабилизирующего движение корабля, возможно эффективное использование активных успокоителей качки.
Можно обратить также внимание на то, что гидроакустические или радиолокационные волны, используемые в системах поиска целей и наведения морского оружия, по физической сути и математическому определению подобны штормовым волнам, по которым должна проводится оптимизация формы корпуса. Тогда один из тезисов метода непротиворечивого проектирования корабля может быть сформулирован как: «Округлая в целом форма корпуса способствует штормовой стабилизации корабля и уменьшает интенсивность гидроакустических и радиолокационных откликов для систем его обнаружения противником».
Безопасность штормового плавания и общие вопросы хорошей мореходности
Основные предположения об улучшенных мореходных качествах гипотетической модели корабля с уменьшенной площадью и инерцией действующей ватерлинии, испытанной в опытовом бассейне, сделаны с использованием технико-исторического анализа мореходности кораблей и судов, строившихся до конца XIX - начала XX веков. В те далекие исторические времена проектирование новых кораблей обычно выполнялось при активном участии самих мореплавателей. До этого же срока существовала техническая эволюция и последовательное совершенствование представлений о наиболее мореходной форме корпуса, история которых берет свое начало от древнего Финикийского флота.
При построении обводов перспективных кораблей и судов, представляемых в данной главе, учитывались также многочисленные наблюдения за штормовыми мореходными качествами судов флота рыбной промышленности СССР в атлантических и тихоокеанских рыбопромысловых экспедициях.
За исторический прототип при выборе формы корпуса удобнее всего использовать крейсер “Аврора”. Для более отчетливой демонстрации хорошей мореходности “Авроры”, ее мореходные свойства, обуславливаемые формой корпуса, в испытанной гипотетической модели существенно усилены в соответствии с проектной последовательностью: {современный корабль}
® {Крейсер “Аврора”} ®
{новый гипотетический корпус с гиперболизованными свойствами формы корпуса}.
Результаты технико-исторического анализа мореходности сводятся к системе требований:
1. Смещение центра величины в нос за счет развитых бульбовых образований в носовой оконечности.
Цель: Обеспечение безопасного штормования без хода и стабилизация корпуса корабля, движущегося в условиях штормового волнения;
2. Существенное снижение величины продольного момента инерции площади действующей ватерлинии и заострение ее в оконечностях.
Цель: Снижение динамического влияния морского волнения на килевую качку;
3. Исключение развала бортов, широкой палубы и наклона форштевня вперед в носовой оконечности корпуса.
Цель: Предотвращение слемминга и ударов волн по скуле. Достижение устойчивости на штормовом курсе. Уменьшение килевой качки;
4. Уменьшение ширины и непрерывности площади верхней палубы.
Цель: Обеспечение остойчивости в условиях штормового волнения, при усиленной заливаемости верхней палубы;
5. Существенное уменьшение надводных объемов в оконечностях, с соответствующим перераспределением их в среднюю часть корпуса.
Цель: Стабилизация качки корабля движущегося на волнении. Уменьшение рыскания на курсе. Предотвращение захвата корпуса попутной волной;
6. Существенное уменьшение и снижение парусности корпуса и надстроек, с перенесением соответствующих помещений внутрь корпуса под верхнюю водонепроницаемую палубу.
Цель: Снятие ограничений на выбор курса штормового плавания и уменьшение динамического воздействия ветра, волнения и обледенения.
Таким образом, в разрабатываемых обводах кораблей и судов планируется учесть требования технико-исторического анализа мореходности и в полной мере использовать основные неформализованные представления о хорошей морской практике, отвечающие за поддержание штормовой мореходности корабля в различных условиях активного плавания или пассивного штормования под властью штормовой стихии.
Различные по назначению проекты морских кораблей повышенной штормовой мореходности удобнее всего представлять в виде специальных эскизных прорисовок внешнеархитектурного облика, согласованных теоретических чертежей судовых обводов и компьютерных моделей формы корпуса, допускающих как расчеты по теории корабля, так и численное моделирование корабельного волнообразования и волнового сопротивления.
1. Быстроходный корабль
(патрульно-гидрографическое судно)
Непротиворечивое проектирование корабля подразумевает комплексное исследование современных технических решений, опыта эксплуатации и хорошей морской практики по управлению кораблем в сложных условиях плавания, а также отработку всех аспектов судовождения нового корабля, особенно в сложных условиях плавания или ограниченной мореходности.
| Проектные характеристики компромиссной формы корпуса быстроходного корабля |
| Длина наибольшая / ватерлинии |
L |
90 / 88,6 м; |
| Ширина наибольшая / ватерлинии |
B |
10 / 9 м; |
| Ширина по верхней палубе |
ВDeck |
8 м; |
| Осадка по основной линии / с бульбом |
T |
4 / 5 м; |
| Водоизмещение |
W |
1 900 м3; |
| Площадь смоченной поверхности |
S |
996 м2; |
| Коэффициент общей полноты |
d |
0.473. |
Назначением нового гипотетического корабля может быть контроль и охрана морских рубежей России, что, как предполагается, сделает основным режимом его морского дежурства непрерывный контроль надводной и подводной обстановки в штормовых акваториях дальневосточного побережья России и в северо-западной части Тихого океана. Соответственно, при необходимом минимуме вооружений, корабль может быть оснащен современным, в том числе экспериментальным, научным океанологическим, гидрографическим и гидрометеорологическим оборудованием, предназначенным для полного и комплексного освещения морской обстановки.

Рис. 26. Модель корабля на берегу Амура в г. Комсомольске-на-Амуре.
Затенения в подводной части корпуса показывают скуловые участки, которые отвечают за взаимодействие корпуса со штормовыми волнами на ходу корабля.
Рис. 27. Прорисовка формы корпуса быстроходного корабля. Так же как у средневековых парусников и быстроходных кораблей конца XIX века, мидель-шпангоут вписан в окружность. В этой же окружности должны быть размещены основные палубные надстройки, что в целом обеспечит пассивность корпуса как по отношению к штормовому волнению, так и его невидимость по отношению к внешним гидроакустическим и радиолокационным средствам обнаружения.
Для достижения указанных целей в обводы и внешнюю архитектуру корабля вносятся следующие ключевые элементы формы корпуса:
- корпус корабля в целом, вместе с палубными надстройками на проекции корпус теоретического чертежа имеет вид подобный круговому цилиндру, что важно для общей стабилизации корабля при ходе произвольным курсом относительно интенсивного волнения и зыби;
- внутренний завал борта, в том числе в средней части корпуса достигает максимальной величины на уровне действующей ватерлинии;
- оконечности корпуса заостряются со смещением дополнительных подводных объемов в носовую, а надводных – в кормовую часть корабля;
- крейсерская корма имеет ярко выраженный кормовой подзор, обеспечивающий стабилизацию потока в районе винто-рулевого комплекса;
- ограниченный по площади плавник ахтерштевня позволяет скатываться (рыскать) с попутной волны, не допуская жестких ударов волн в районе кормовой раковины;
- форма и размеры носового бульба устанавливаются из необходимости размещения подводного гидроакустического оборудования, однако килевая линия к носу поднимается, образуя «подрез», что несколько уменьшает рыскание в условиях бортовой качки;
- аппарель и ангар кормового буксируемого подводного аппарата устраиваются таким образом, чтобы это вносило минимальные искажения в заостренную и скругленную форму надводного борта кормовой оконечности корабля;
- основная парусность палубных надстроек и рангоута сосредоточена в средней части корпуса, ширина надстроек нигде не доходит до внешнего борта, чтобы не нарушать общую форму корпуса в виде кругового цилиндра с продольной осью на уровне действующей ватерлинии.
- непрерывная площадь верхней палубы минимизирована продольным расположением надстроек и фундаментов палубных устройств и механизмов.
В качестве главных требований к форме корпуса быстроходного корабля определяется возможность эффективного поддержания хода произвольным курсом относительно интенсивного морского волнения, при условии максимальной стабилизации корпуса как платформы для всех видов вооружений и систем контроля обстановки на море.
На особенностях формирования внешней архитектуры корабля сказываются обязательная установка ангара для кормового буксируемого подводного аппарата, бортовых океанологических (гидроакустических) параванов, которые в комплексе с аппаратурой в носовом бульбе позволят образовывать большое разнесенное антенное поле для гидроакустических, магнитных и пр. наблюдений за процессами в водной среде, и в том числе на глубинах ниже слоя звукового канала.
Рис. 28. Проект компромиссного варианта быстроходного корабля.
Это компромиссный вариант, в котором реализована длинная непрерывная палуба фиксированной ширины, а также обеспечено сильное демпфирование килевой качки за счет развала бортов в оконечностях. Развитый и заглубленный бульб необходим для установки гидроакустических систем отчасти в ущерб мореходным качествам корабля на волнении

Рис. 29. Характер корабельного волнообразования. На малой скорости хода носовая расходящаяся волна свободно отрывается, не затягиваясь под скулу корпуса с развитым носовым бульбом |
(обеспечение мореходности и эффективности
гидроакустических средств возможны, по-видимому, только при использовании выдвижных гондол под днищем в средней части корпуса).
Килевая линия бульба – с «подрезом», чтобы, по крайней мере, он сам находился в стабилизированном потоке, чему также должна способствовать уменьшенная полнота носовых ватерлиний. Ширина и высота палубы бака также выбрана из компромиссных условий для сохранения традиционных методов работы со швартовными и якорными устройствами.
Для улучшения штормовой мореходности надводный объем бака следует уменьшить, ограничив возможности открытого использования палубных механизмов, возможно, применив также «новые» технологии для работы с якорными устройствами.
Рис. 30. Расчет волнового сопротивления и корабельного волнообразования быстроходного корабля повышенной штормовой мореходности. В левом верхнем углу приведены графики коэффициента волнового сопротивления (Cx) и удельного волнового сопротивления (Rx /D). В нижней части рисунка показано распределение суммарных интенсивностей корабельного волнообразования вдоль корпуса судна, построенных для скоростей хода Fn = 0.5; 0.45; 0.4; 0.35; 0.3; 0.25; 0.2 и характеризующих геометрические особенности интерференции волны на уровне ватерлинии.
Форма ахтерштевня и кормового подзора обеспечивают прижатие кормы к среднему уровню моря на ходу корабля, что создает условия для захвата кормы попутной волной, что при развитом бульбе может приводить к излишнему рысканию и усиленной килевой и бортовой качке. Чтобы снизить указанные негативные явления, площадь плавникового ахтерштевня уменьшена, чтобы позволить кормовой части корабля свободно рыскать, уклоняясь тем самым от ударов штормовых волн в раковину.
Основная плавучесть корпуса собрана в его средней части, оконечности же, по возможности, заострены, но также обладают довольно большими запасами надводных объемов, которые должны способствовать демпфированию килевой качки. Центр динамического бокового сопротивления будет смещен далеко в нос, и на высокой скорости хода набегающим потоком воды бульбовый нос будет жестко удерживать корабль на курсе. Но все же предполагается, что гидродинамические особенности гребней штормовых волн не приведут к возникновению чрезмерных или ударных дифферентующих моментов, и килевая качка будет ослаблена или хотя бы оптимально сбалансирована с вертикальной. Если же в экспериментах, по ходкости и качке на волнении, выявится опасность параметрического резонанса, то полноту и форму надводного борта в оконечностях надо будет пересмотреть в сторону заужения и завала надводного борта на большей протяженности от средней части корпуса.

Рис. 31. Эксперименты в опытовом бассейне (слева) и на озере Тунайча в открытом водоеме (справа) с самоходной моделью быстроходного корабля. Округлый корпус не разрушает гребни крупных волн, что позволяет ему поддерживать высокую скорость хода. Однако в условиях интенсивного волнения глубоко посаженный носовой бульб ухудшает управляемость.
Палуба в оконечностях, ют и бак - довольно высокие, что позволит работать на верхней палубе (с кормовой аппарелью и носовыми палубными устройствами) в свежую погоду. Расширенная и высокая палуба в оконечностях несколько снизит стабилизацию корпуса на косых штормовых курсах относительно волнения, однако для корабля с мощной энергетической установкой возможна специальная отработка режимов активного штормового хода, для чего в область винто-рулевого комплекса обводы корпуса позволяют «подсасывать» относительно стабильный поток воды из-под днища.
Учитывая, что надводный борт в оконечностях корабля сохранен довольно большим, при размещении внутрикорпусных механизмов и судовых запасов желательно не сосредотачивать их массу в средней части корпуса. Соответствующее увеличение продольного момента инерции массы корпуса несколько снизит интенсивность килевой качки и продольных изгибных моментов под воздействием крупных морских волн.
Несмотря на компромиссность проектных решений по форме корпуса, принятых с учетом необходимости устройства большого носового бульба, а также высокого надводного борта с широкой и непрерывной палубой, основные мореходные качества новой формы корпуса все же были обеспечены, что подтверждается графиками кривых элементов теоретического чертежа и диаграммами плеч остойчивости формы, прорисованными при условии равенства аппликат центра тяжести и центра величины погруженной части корпуса.
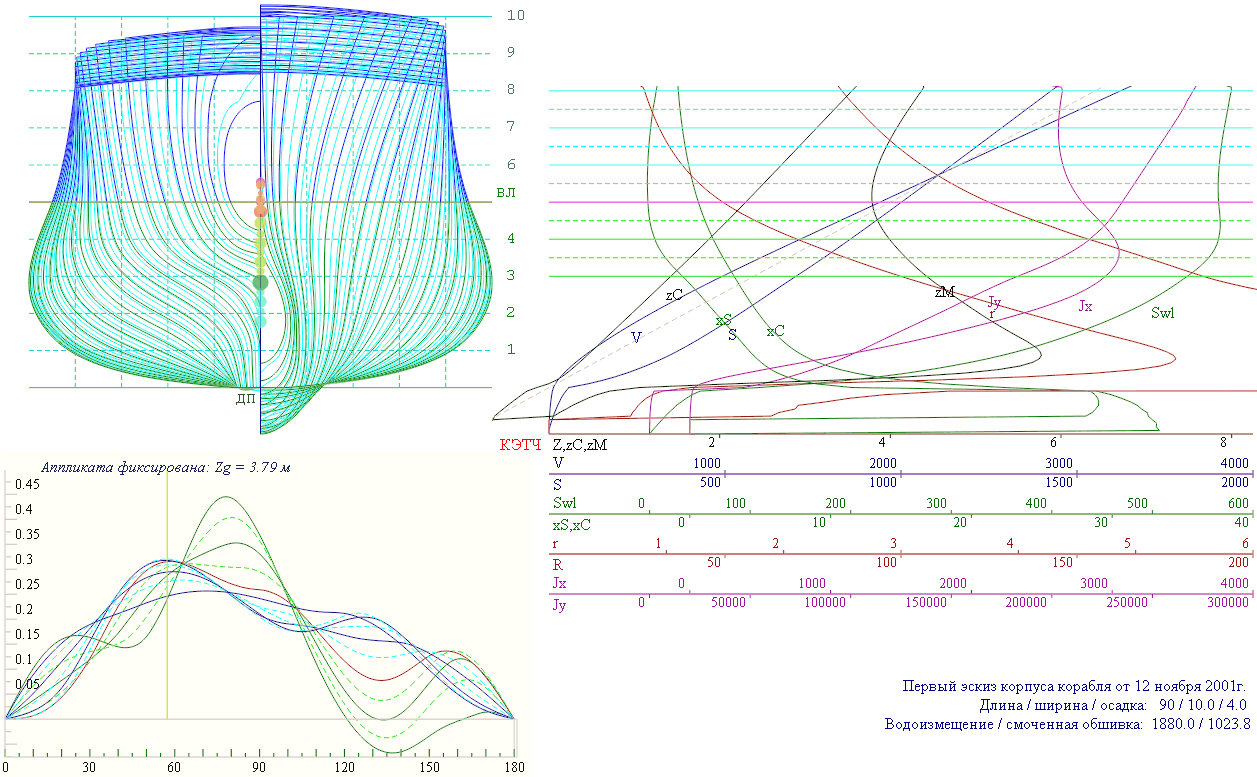
Рис. 32. Диаграммы плеч остойчивости формы корпуса (слева) для различных осадок, отмеченных на проекции теоретического чертежа (слева вверху). Диаграммы соответствуют нулевой метацентрической высоте h=0 по конструктивной осадке, с фиксированной аппликатой центра тяжести на уровне Zg=3,79 м (чуть ниже ватерлинии). При любом изменении посадки плечи остойчивости на малых углах крена становятся положительными, угол заката диаграммы остойчивости на основных осадках отсутствует. При затоплении корабля забортной водой должно отмечаться спрямление крена. Кривая остойчивости, соответствующая конструктивной осадке, выделена красным, зеленым - всплытие, синим - погружение корпуса, например в условиях штормовой вертикальной качки.
Кривые элементов теоретического чертежа (справа). Здесь и далее на графиках приведены zC, zM – аппликаты центра величины и метацентра; V – грузовой размер; S – площадь смоченной поверхности корпуса; Swl – площадь действующей ватерлинии; xS, xC – абсциссы центров площади ватерлинии и величины; Jx, Jy – продольный и поперечный моменты инерции площади действующей ватерлинии; R, r – продольный и поперечный метацентрические радиусы.
Кривые элементов теоретического чертежа в полной мере характеризуют гидростатические особенности формы корпуса, а также позволяют сделать оценки гидродинамических воздействий на корпус корабля, находящегося в свободном плавании на взволнованной поверхности моря.
Из анализа кривых элементов теоретического чертежа можно сделать следующие выводы о мореходных качествах нового корабля:
- минимум аппликаты метацентра (zM) приходится строго на конструктивную осадку корабля, что позволяет безопасно удерживать метацентрическую высоту близкой к нулю, что в свою очередь позволяет пассивными методами снизить качку на интенсивном морском волнении, а также создает условия для эффективной работы активных успокоителей бортовой качки;
- несмотря на то, что при увеличении осадки (Z) площадь действующей ватерлинии (Swl) также растет, но все же продольный момент инерции площади этой ватерлинии (Jx) уменьшается, что подтверждает качество формы корпуса по снижению силового взаимодействия с гребнями крупных морских волн, отражающихся на бортовой качке;
- поперечный момент инерции площади действующей ватерлинии (Jy) растет при увеличении осадки, что обусловлено устройством широкой верхней палубы, не сужающейся к оконечностям. Это приведет к некоторому улучшению всхожести на волну и незаливаемости верхних палуб, однако – за счет ухудшения условий взаимодействия корпуса с океанской зыбью на ходу корабля;
- довольно хорошо выдерживается вертикаль абсцисс центров величины (xC) и площади действующей ватерлинии (xS) во всем диапазоне рабочих осадок, и в том числе обусловленных вертикальной качкой на волнении, что должно создать условия для успокоения рыскания на курсе, из-за которого корабль может неоправданно терять ход даже на умеренном волнении.
При построении диаграмм остойчивости центр тяжести может быть совмещен с центром величины погруженной части корпуса, 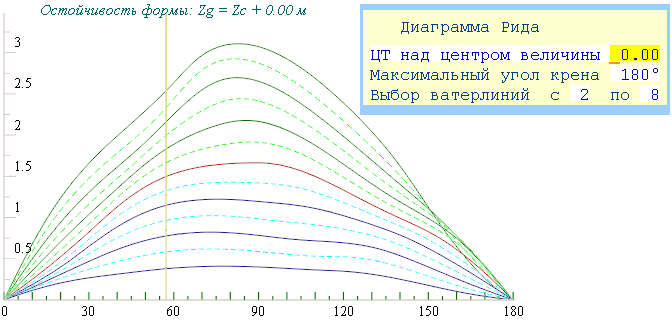 тогда восстанавливающие моменты сводудтся к величине плеч, образованных перемещениями центра величины при больших равнообъемных накренениях. Анализ таких диаграмм позволяет оценить особенности гидростатики корпуса, а также характер его взаимодействия с волнением при бортовой качке:
тогда восстанавливающие моменты сводудтся к величине плеч, образованных перемещениями центра величины при больших равнообъемных накренениях. Анализ таких диаграмм позволяет оценить особенности гидростатики корпуса, а также характер его взаимодействия с волнением при бортовой качке:
1. При конструктивной осадке, соответствующей максимальному завалу бортов в средней части корпуса, диаграмма остойчивости приобретает S-образную форму, что необходимо для безопасного снижения начальной остойчивости и увеличения собственных периодов бортовой качки корабля, при которых активные стабилизаторы крена смогут работать с максимальной эффективностью;
2. Центр площади диаграмм остойчивости расположен вблизи отметки угла 90°, что свойственно плавающим телам цилиндрической формы, у которых моменты инерции площади действующей ватерлинии не изменяются даже при больших углах крена. На всех рабочих осадках отсутствуют углы заката диаграмм остойчивости, что также свидетельствует о нейтральности или гидродинамической пассивности корпуса в условиях морского волнения с интенсивной бортовой и вертикальной качкой.
Эффективных успокоителей килевой качки на таком компромиссном корпусе сделать нельзя, тем не менее, следует предусмотреть возможность продольной перекачки балласта для частичного изменения инерционных характеристик корпуса, что в условиях штормового волнения несколько расширит возможности пассивной стабилизации корпуса и возможности выбора оптимального штормового курса и скорости. По данному корпусу остаются открытыми вопросы о возможности возникновения динамического дифферента или потери остойчивости на больших скоростях хода, а также полная неопределенность гидродинамического поведения большого носового бульба в условиях плавания на крупном морском волнении.
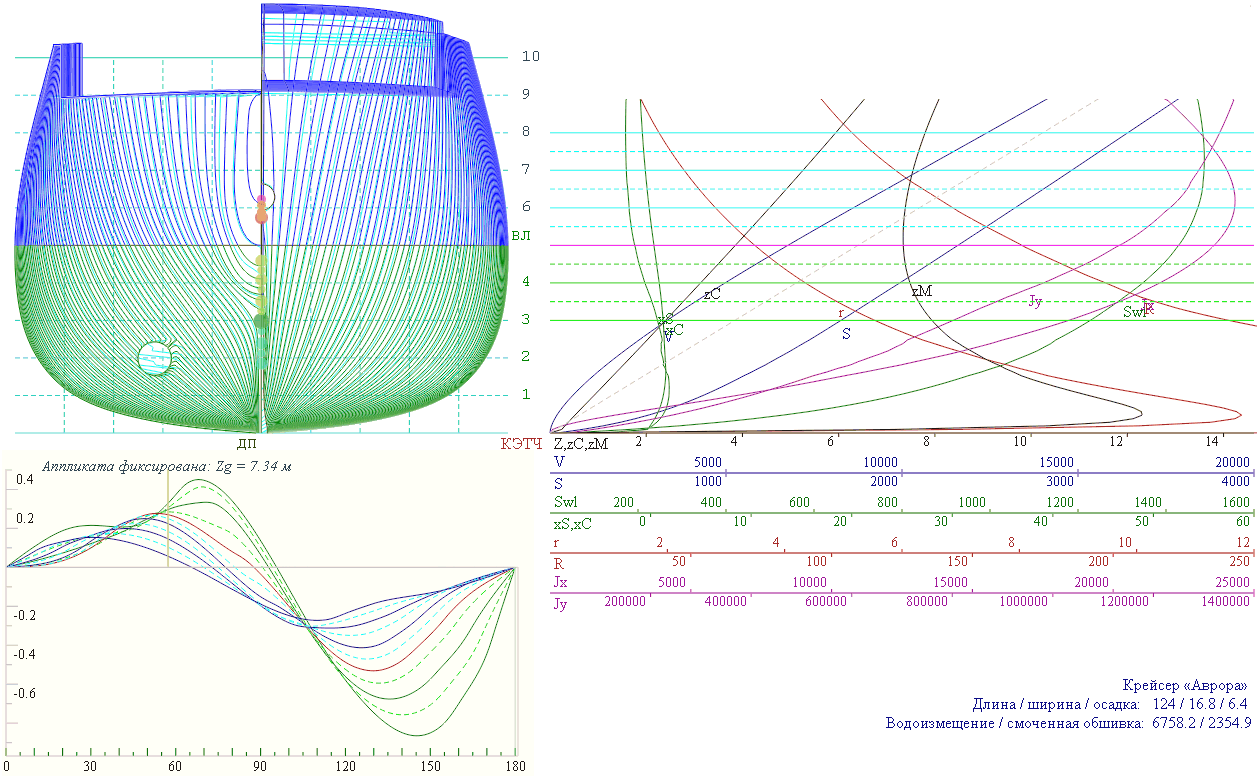
Рис. 33. Кривые элементов теоретического чертежа и диаграммы остойчивости крейсера «Аврора». Расчёт выполнен для нулевой метацентрической высоты h=0 с фиксированной для всех осадок аппликатой центра тяжести Zg=7,34 м, немного выше ватерлинии. Очень плавные и симметричные обводы корпуса, сбалансированность архитектуры его палубных надстроек и корабельных механизмов, также как и идеальные расчётные гидродинамические характеристики возвращают статус революционности крейсера в плане его превосходной штормовой мореходности, и особо для современного кораблестроения.
Рассматриваемый здесь перспективный корабль имеет исторические прототипы, отменные мореходные качества которых были подтверждены хорошей, но уже исторической морской практикой. Это корабли класса эсминцев и крейсеров конца XIX – начала XX веков.
Отмеченные недостатки, которые могут проявиться у нового быстроходного корабля, отсутствуют у исторического крейсера «Аврора», который при этом сочетает практически все, без исключения, гидродинамические достоинства рассматриваемых в этой книге кораблей и судов повышенной штормовой мореходности.
Однако крейсер «Аврора», как и поздние парусники, не имел корпуса, который обеспечивал бы возможности безопасного штормования без хода. Хотя, при возникновении необходимости такого пассивного плавания, для выхода на курс носом на волну крейсер «Аврора» мог воспользоваться штормовым парусом на гафеле грот-мачты. Следующий проект пассажирского лайнера представляет пример внешнего облика судна, для которого безопасность штормового плавания с остановленными машинами обеспечивается специальной формой корпуса и палубных надстроек.
2. Пассажирское судно
Главным требованием к пассажирскому судну является обеспечение безопасности в сложных и штормовых условиях плавания, в том числе при остановке главных двигателей и полной потере управления и контроля за динамикой судна в обстановке интенсивного волнения и ураганного ветра. К важным эксплуатационным требованиям можно отнести обеспечение комфортности обитания при плавании на интенсивном морском волнении, а также устройство высоких палубных надстроек, в которых должны располагаться салоны для отдыха и наиболее комфортабельные жилые помещения.
Близким по мореходности историческим прототипом может быть выбрана средневековая каравелла с высокой кормовой надстройкой и заниженным баком, не обладающим свойством всхожести на волну и не противостоящим заливаемости носовой палубы. Обычные каюты пассажиров и экипажа, бытовые и вспомогательные помещения могут быть расположены ниже главной палубы вдоль бортов по всей длине корпуса. Переходы между водонепроницаемыми отсеками (в случае общесудовых тревог) могут быть устроены внутри непрерывной продольной надстройки на верхней палубе.
В кормовой надстройке, расположенной высоко над водой в защищенной от воздействия волн и качки кормовой части корпуса, могут быть расположены наиболее комфортабельные каюты, зоны отдыха и общественные помещения.
|
Проектные характеристики формы корпуса пассажирского судна |
| Длина наибольшая / ватерлинии |
L |
103 / 100 м; |
| Ширина наибольшая /ватерлинии |
B |
16 / 15.2 м; |
| Ширина по верхней палубе |
ВDeck |
13 м; |
| Осадка |
Т |
5 м; |
| Водоизмещение |
W |
4 677 м3; |
| Площадь смоченной поверхности |
S |
1 620 м2; |
| Коэффициент общей полноты |
d |
0.579. |
Для обеспечения возможности работы судна в небольших гаванях Курильских островов и других плохооборудованных гаванях Дальнего Востока России осадка ограничивается величиной T = 5.0 м, что при максимальной ширине В = 16 м составит довольно большую величину отношения ширины к осадке B/ T = 3.2. Такое судно наиболее сильно подвержено воздействию интенсивного морского волнения и ветра, особенно в штормовые сезоны на акваториях северо-западной части Тихого океана Дальнего Востока России.
Корпус пассажирского судна может иметь очень малый коэффициент общей полноты, что позволяет основной объем подводной части корпуса сосредоточить в его средней части и допустить заострение и уменьшение инерции подводных объемов и площади ватерлинии в оконечностях. Носовая часть корпуса образована вертикальным бульбовым форштевнем, который улучшает обтекаемость корпуса на больших скоростях хода. Надводный борт в носовой части корпуса при встрече с волной выполняет роль княвдигеда и практически не обладает всхожестью на волну. Однако в условиях пассивного штормования бак, принимая на себя первый удар обрушающегося высокоскоростного гребня, разрушает монолитность фронта встречной волны, частично защищая таким образом ходовую рубку и среднюю часть корпуса.
Рис. 34. Гипотетический проект пассажирского судна со схематичной прорисовкой общего расположения.
Полнота надводного борта в районе действующей ватерлинии снижена, что необходимо для стабилизации килевой качки на большой скорости хода в условиях интенсивного волнения и зыби. Кормовая часть корпуса выполняет роль надводного «штормового флюгера». Кормовой подзор почти «плоский» и без плавникового ахтерштевня. Это делает корму свободной для рыскания при всплытии на волне, тем самым ослабляя кренящие нагрузки в условиях, когда бульбовый нос удерживает общий центр бокового сопротивления ближе к носовой части корпуса.
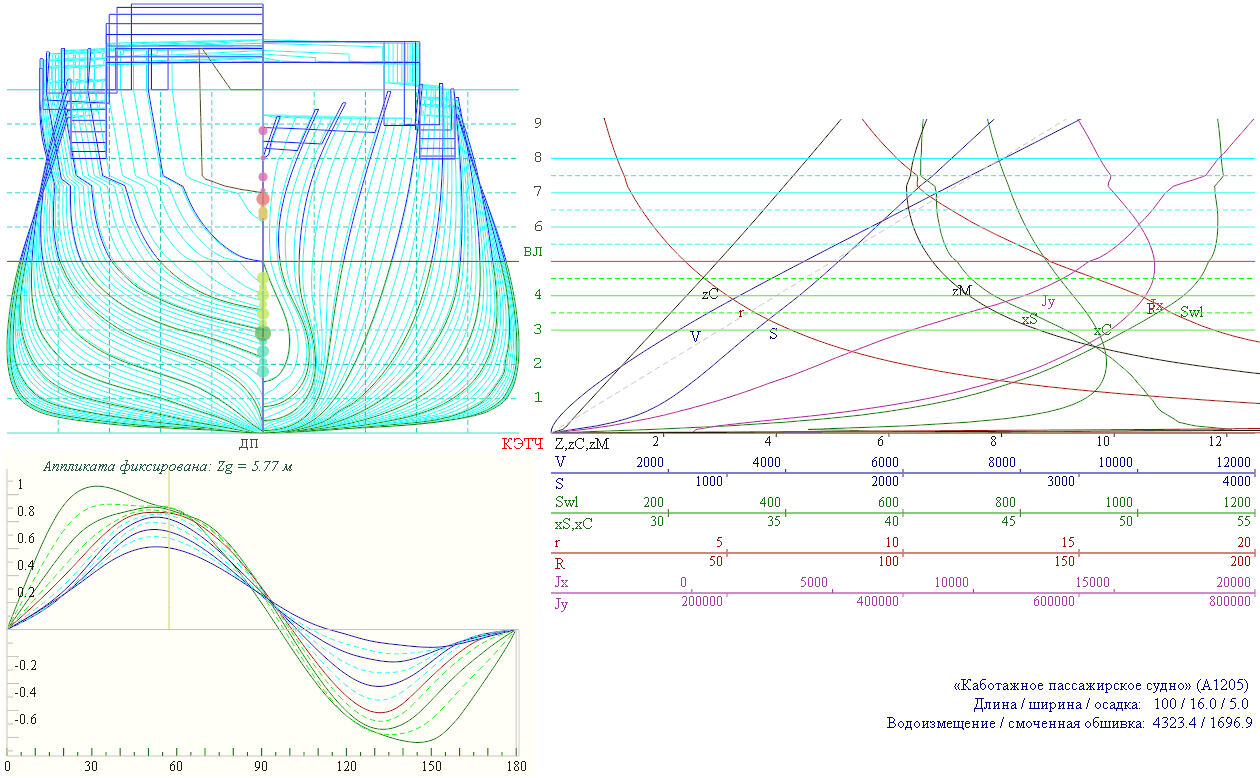
Рис. 35. Кривые элементов теоретического чертежа и плечи остойчивости (h=1.0 м, Zg=5,77 м) при различных осадках.
Несмотря на большую ширину корпуса и относительно малую осадку, кривые элементов теоретического чертежа и плечи остойчивости формы (рис.35) подтверждают удовлетворение основных требований к форме корпуса, обусловленных завалом бортов и малой полнотой оконечностей:
- при увеличении осадки площадь действующей ватерлинии не увеличивается, а ее продольный момент инерции уменьшается, что является одним из важных признаков гидродинамической пассивности корпуса при свободном плавании на взволнованной поверхности моря;
- на конструктивной осадке диаграмма остойчивости будет иметь S-образную форму, что позволяет безопасно снижать остойчивость для увеличения периода бортовой качки и повышения комфортности плавания.
Узкие заостренные ветви носовых ватерлиний позволят судну поддерживать высокую скорость хода произвольным курсом относительно умеренного морского волнения и пологой океанской зыби, при этом в носовой части корпуса не будут развиваться большие кренящие или дифферентующие моменты, и встреча с гребнями волн не приведет к усилению ни бортовой, ни килевой качки. Палуба бака не будет защищена от захлестывания высокоскоростными гребнями волн, поэтому там должна быть увеличена погибь бимсов, а в фальшбортах устроены сплошные разрезы для быстрого сбрасывания потоков воды с палубы за борт.

Рис. 36. Корпус модели пассажирского судна на стапеле сахалинских судомоделистов – школьников.
На большой скорости хода основные волновые нагрузки будут приходиться на носовую часть корпуса, а кормовой подзор окажется в возмущенном и частично сбалансированном потоке, что важно как для стабильной работы винто-рулевого комплекса, так и для обеспечения комфортных условий обитания в высокой кормовой надстройке.
В случае же остановки главных двигателей, подобно штормовому флюгеру, судно самостоятельно выйдет на курс носом на волну, на котором удары волн будут приходиться на палубу бака и носовую надстройку, а кормовая часть корпуса окажется в частично стабилизированном волновом поле и укрытой от прямого воздействия гребней волн.
3. Универсальное транспортное судно
Важнейшим мореходным качеством транспортного судна является возможность поддержания заданной скорости хода в любых погодных условиях, при этом корпус должен обеспечивать минимальность поступательных ускорений в оконечностях и умеренность качки, чтобы прочность креплений грузов была достаточной для его удержания как в трюмах, так и на верхней палубе.
| Проектные характеристики формы корпуса |
| Длина наибольшая / ватерлинии |
L |
171 / 160 м; |
| Ширина наибольшая /ватерлинии |
B |
26 / 20 м; |
| Ширина по верхней палубе |
BDeck |
20.5 м; |
| Осадка |
Т |
11 м; |
| Водоизмещение |
W |
25 168 м3; |
| Площадь смоченной поверхности |
S |
5 343 м2; |
| Коэффициент общей полноты |
d |
0.716. |
Рис. 37. Эскизная прорисовка формы корпуса и общего расположения универсального транспортного судна.
В новом проекте показывается, что реализация формы корпуса, удовлетворяющей заданным требованиям по штормовой мореходности, возможна даже в случае многоцелевого транспортного судна, в том числе приспособленного к контейнерным перевозкам и допускающего горизонтальную обработку грузов. При этом гипотетическое судно может даже не нарушать традиционных канонов общекорабельной архитектуры и сохранить основные функциональные возможности современного универсального транспортного судна. Достаточно пожертвовать только объемами бортовых надводных твиндеков, а для сохранения большой грузоподъемности (как коэффициента общей полноты корпуса), к примеру, увеличить полноту и объем подводной части корпуса в бульбовых оконечностях.
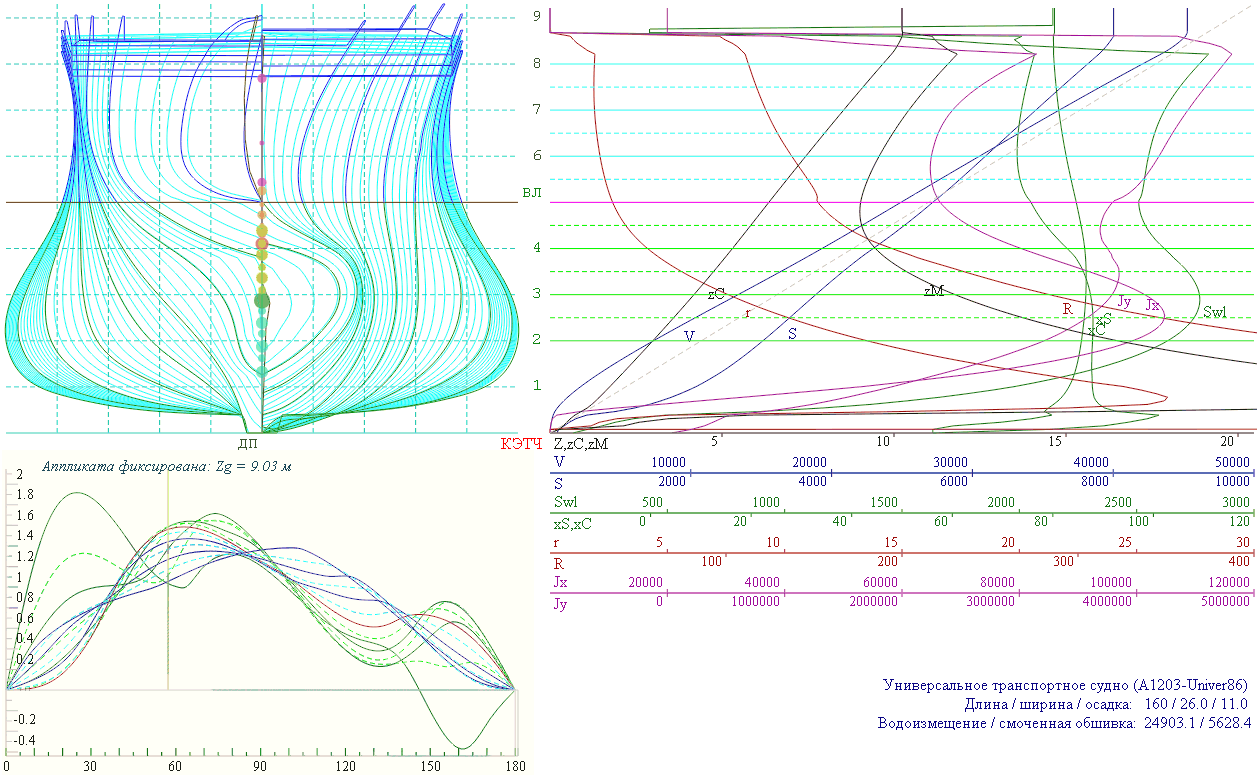
Рис. 38. Кривые элементов теоретического чертежа для корпуса универсального транспортного судна (справа). Минимальные значения аппликаты метацентра, площади и моментов инерции ватерлинии приходятся на уровень грузовой ватерлинии.
Плечи остойчивости формы корпуса (слева внизу) при нулевой метацентрической высота h=0 м сохраняется немалый запас остойчивости с максимальным плечом более 1,5 м. На графиках фиксированная аппликата центра тяжести Zg=9,03 м, для различных осадок. Кривая остойчивости для грузовой ватерлинии выделена красным цветом, другие непрерывные линии соответствуют изменению осадки на 2.2 метра. На рабочих осадках корпус имеет ярко выраженную S-образность диаграмм остойчивости.
Следующие элементы свидетельствуют о компромиссных конструктивных решениях, включенных в проект оптимизированного универсального грузового судна:
- сохранена широкая верхняя палуба, на которой располагается полный комплекс грузовых устройств для проведения автономных погрузо-разгрузочных операций;
- широкая и полная корма, в которой расположена аппарель для горизонтальной обработки грузов, приема большегрузных автомобилей и железнодорожных вагонов;
- рабочий объем корпуса приспособлен для загрузки максимального количества стандартных контейнеров, при этом судовые запасы и внутрикорпусные механизмы разнесены по отсекам с сильно искривленными бортовыми поверхностями.

Рис. 39. При встрече транспортного судна с крупной штормовой волной, тяжелый носовой бульб частично разрушает монолитность фронта, перенося силы всплытия ближе к средней части корпуса.
Выдвинутый вперед и тяжелозагруженный бульб позволит существенно увеличить поперечный момент инерции массы корпуса, что при малом поперечном моменте инерции площади ватерлинии обеспечивает снижение интенсивности и увеличение периода килевой качки, благоприятно сказывается на снижении ускорений в оконечностях.
4. Морской спасатель, гидрографическое судно
| Проектные характеристики формы корпуса судна для активного штормового хода |
| Длина наибольшая |
L |
62.8 м; |
| Длина по ватерлинии |
LKWL |
60 м; |
| Ширина наибольшая |
B |
10.3 м; |
| Ширина по ватерлинии |
ВKWL |
10 м; |
| Ширина по верхней палубе |
ВDeck |
8.66 м; |
| Осадка носом |
ТН |
4 м; |
| Осадка кормой |
ТК |
6 м; |
| Водоизмещение |
W |
1 740 м3; |
| Площадь смоченной поверхности |
S |
809 м2; |
| Коэффициент общей полноты |
d |
0.58. |
Небольшие океанские суда вспомогательного флота используются по различному назначению, в том числе в экстремально сложных условиях плавания. Это могут быть спасательные операции, буксировки аварийных судов в штормовых условиях, срочная доставка небольших грузов и почты в морские экспедиции, а также проведение различных морских исследований, поисковых работ и других длительных океанских рейсов и специальных морских операций.
Небольшой корабль может обладать достаточно прочным корпусом и изрядно мощным двигателем для активного противостояния штормовой стихии и соответственно безусловного выполнения поставленной задачи в режиме активного поддержания высокой скорости хода и требуемой динамики корпуса в условиях интенсивного волнения и под ударами ураганных ветров. Активная стабилизация качки, а также динамическое влияние на посадку, крен и дифферент судна с использованием плавниковых успокоителей и автоматически управляемых рулей и движителей принципиально возможны при условии, что форма корпуса и архитектура надстроек обеспечат пассивное снижение интенсивности силового взаимодействия корпуса с морским волнением.
Фактически это означает, что следование концепции непротивления штормовой стихии является универсальным правилом проектирования кораблей и судов, обеспеченных как пассивными качествами безопасного плавания, так и активными средствами для решения поставленных задач в штормовых условиях.

Рис. 40. Судно имеет минимальный надводный борт, отчего в общий запас плавучести (в контур прочного водонепроницаемого корпуса) включена также и носовая надстройка.
При выборе концепции построения обводов корпуса можно сориентироваться на способности водоплавающих птиц, которые уверенно удерживают свое тело горизонтально даже при встрече с крупными гребнями обрушающихся волн. Форма корпуса и надстроек для активно позиционирующего на волнении судна может быть определена следующими конструктивными элементами:
Рис. 41. Форма корпуса и концептуальная схема общего расположения морского спасателя – научно-исследовательского судна, способного к активному позиционированию в условиях интенсивного волнения и ураганного ветра.
1) корпус в целом подобен круговому цилиндру, что необходимо для минимизации волновых сил, приводящих к бортовой качке;
2) основной объем и центр величины корпуса смещены в кормовую часть, что способствует смещению в корму центров килевой качки и рыскания, приближая их к зоне действия сил руля и движителей;
3) полная корма с высоким ютом и глубоко погруженным плавниковым ахтерштевнем обеспечивают управляемость судна в штормовых условиях, позволяя экипажу проводить палубные работы в кормовой части корпуса;
4) зауженные и заостренные носовые ватерлинии не обеспечивают всхожести на волну, отчего центр всплытия и ось килевой качки на ходу судна также смещаются в корму, ближе к средней части корпуса;
5) основная масса судна сосредотачивается в средней части корпуса, что уменьшает поперечный момент инерции массы судна и позволяет использовать горизонтальные поворотные насадки на движителях для успокоения килевой качки и выравнивания дифферента при позиционировании на волнении;
6) центр парусности надстройки смещен в носовую часть корпуса, что приводит его на одну вертикаль с динамическим центром бокового сопротивления при ветровом дрейфе судна;
7) форма надводного объема носовой части корпуса приспособлена к прорезанию гребней штормовых волн в условиях повышенной заливаемости, для чего палуба бака максимально снижена, а носовая надстройка включена в контур прочного водонепроницаемого корпуса.
Оптимизированное таким образом судно, при условии эффективной работы винто-рулевого комплекса, может выполнять роль научно-исследовательского гидрографического судна, обеспечивающего непрерывное наблюдение за состоянием моря и атмосферы, в том числе в зоне действия тайфунов и штормовых циклонов.

Рис. 42. Самоходная радиоуправляемая модель показывает высокую стабильность корпуса при плавании произвольным курсом на крупном волнении.
Улучшенные штормовые мореходные качества позволят использовать это судно в роли морского спасателя, способного приближаться на минимальное расстояние или швартоваться к другому аварийному судну в условиях интенсивного волнения и ветра. Для выполнения указанных задач в проекте судна могут быть реализованы следующие архитектурно-технические решения:
1. Если корпус будет обладать достаточными качествами по пассивной стабилизации на волнении, то для полного успокоения всех видов качки и рыскания возможно использование специальных поворотных насадок на гребных винтах, ось поворота которых должна иметь горизонтальный наклон порядка 45° или менее. В таком случае при их совместном использовании с традиционным рулем (возможно несколько большей площади) поворотные насадки позволят создавать восстанавливающие моменты для подавления крена и дифферента, а при управляемой нагрузке на винтах для исключения рыскания на курсе, что даст возможность прицельно и жестко позиционировать при спасательных операциях вблизи аварийного судна в условиях штормового маневрирования;
2. Кормовая палуба и ют находятся на уровне 2.5 метра, там возможно размещение мощной автоматической буксирной лебедки с механизмами, укрытыми в кормовой надстройке. Выше линии буксирного троса может быть установлен поворотный портал для буксируемых драг и подводных аппаратов, который при необходимости можно использовать в качестве грузового устройства, в том числе при спасательных операциях

Рис. 43. Округлый корпус судна уменьшает все виды штормовой качки, что уменьшает заливаемость палуб даже при очень низком надводном борте. |
3. Буксирный трос с автоматической лебедки может быть подан на другое судно в качестве швартова с регулируемым натяжением, что при динамическом позиционировании поворотными насадками и задействовании поворотного портала позволит обеспечить транспортный мост на аварийное судно при проведении спасательных операций в штормовых условиях;
4. На низком баке, высота палубы которого составляет 1.2 метра, могут быть установлены кат-балки и океанографические лебедки, в том числе обслуживаемые непосредственно из помещений носовой надстройки, что позволит проводить океанологические замеры даже в условиях частичной заливаемости низкой палубы бака;
5. Второй комплекс океанографических лебедок может быть установлен в средней части корпуса, где палуба также находится над уровнем моря 1.2 метра, но укрыта от прямых ударов волн за носовой надстройкой;
6. Вертолетная площадка на кормовой надстройке может быть оборудована лифтом для опускания вертолета в ангар внутрь помещения, а при проведении спасательных операций эта же площадка может быть использована для приема с аварийного судна людей и грузов.
На примере морского спасателя (научно-исследовательского судна) наиболее ярко иллюстрируются непротиворечивые подходы к проектированию многоцелевого судна, для которого активная стабилизации корпуса согласована с требованием по минимальности воздействия на него со стороны интенсивного морского волнения.
В случае потери хода, например, при повреждении руля или движителей, мореходность судна может оказаться недостаточной для безопасного штормования без хода. Тем не менее, при исправной работе глубоко посаженного руля с повышенной площадью возможно штормование курсом по волне, чему будет помогать смещенная в нос надстройка. Хорошая обтекаемость корпуса в носовой части образована зауженными ватерлиниями. Кормовые обводы, напротив, имеют повышенную полноту, что при штормовании кормой на волну делает судно подобным средневековым парусникам. Умелое использование руля позволит перевести штормование из режима кормой на волну в активный ход под парусом по волне.
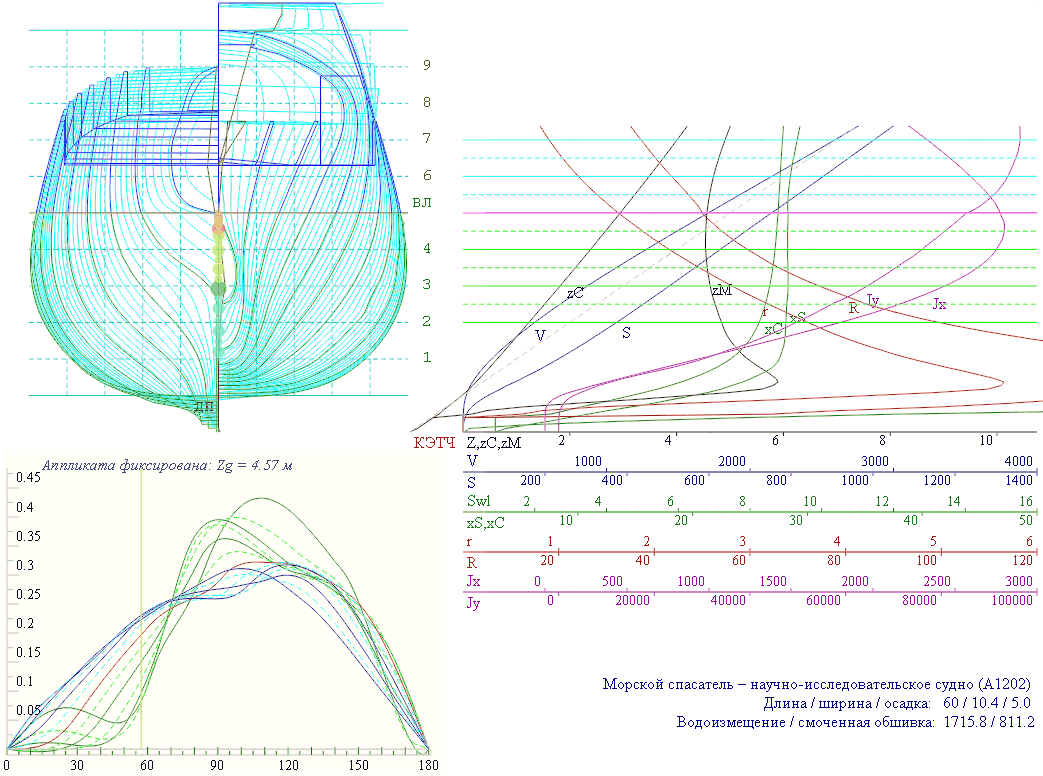
Рис. 44. Кривые элементов теоретического чертежа (справа) научно-исследовательского судна – морского спасателя, оптимизированного для активного хода и маневрирования в штормовых условиях.
Плечи остойчивости формы корпуса c нулевой метацентрической высотой h=0 при фиксированной аппликате центра тяжести Zg=4,57 м. Кривая остойчивости для конструктивной ватерлинии выделена красным цветом, другие соответствуют изменениям посадки, отмеченным ватерлиниями на проекции корпус теоретического чертежа.
Корпус округлой формы имеет диаграммы плеч остойчивости формы без угла заката и со смещенным центром площади (максимальным восстанавливающим моментом) за пределы угла в 90°. Это означает, что на реальных углах крена не возникает больших восстанавливающих моментов, соответственно не возникает и опасных кренящих моментов при волновых наклонах поверхности моря, что позволяет стабилизировать качку судна с помощью активных успокоителей качки (например:
горизонтальных поворотных насадок, позволяющих управлять как креном, так и дифферентом судна).

Рис. 45. По корабельному волнообразованию корпус модели может быть признан вполне оптимальным. |
Все вышеописанные режимы активного штормового плавания, к сожалению, невозможны под традиционным ручным управлением рулем и движителями. Никакого искусства рулевого не хватит даже для точной и заблаговременной перекладки руля при реагировании на крупные волны с периодичностью порядка 10-12 секунд, не говоря уже о взаимозависимых изменениях нагрузки на движителях и горизонтально- поворотных насадках. То есть для реализации активного штормового хода необходима разработка специальных автоматических систем позиционирования и маневрирования судна, основанных на идентификации параметров динамики корпуса в его взаимодействии с внешним волновым возмущением и способных оптимизировать интенсивность подачи управляющих команд на руль, движители и поворотные насадки (и швартовно-буксирную лебедку) при активном противостоянии штормовым нагрузкам на судно.
Рис. 46. Расчет волнового сопротивления и корабельного волнообразования для судна повышенной штормовой мореходности. Слева вверху приведены графики коэффициента волнового сопротивления (Cw) и удельного волнового сопротивления (Rw / D). Вдоль корпуса показано распределение суммарной энергии корабельного волнообразования для скоростей Fn = 0.5; 0.45; 0.4; 0.35; 0.3; 0.25; 0.2.
Графиками распределения энергии корабельного волнообразования вдоль корпуса судна подтверждается минимизация волнообразования в носовой части корпуса в сравнении с кормовой. Принимая принцип обратимости волнообразования и воздействия на корпус со стороны внешнего волнения, можно считать, что также будет снижена интенсивность воздействия на носовую часть корпуса со стороны океанской зыби и штормового волнения.
5. Рыболовный траулер
Условия эксплуатации и производственной деятельности рыболовного траулера ставят следующие необходимые проектные требования к форме корпуса и общекорабельной архитектуре:
1. Кормовая часть корпуса должна иметь две палубы, расположенные над главной палубой прочного водонепроницаемого корпуса:
- Закрытая палуба рыбообрабатывающего цеха, в производственной деятельности которого используется большое количество забортной воды, свободно сливаемой за борт через большие шпигаты или полупортики;
- Верхняя траловая палуба, общая площадь, длина и ширина которой должны позволять одновременную работу с двумя рыбопромысловыми тралами, обеспечивая постановку второго трала сразу же после подъема на борт рабочего трала с уловом;
2. Широкая (транцевая) корма устраивается для работы с траловыми досками, переключение которых между поднимаемым и готовящимся к постановке тралами должно производиться в бортовых «карманах» в районе тралового слипа;
3. Вся траловая палуба закрывается с бортов от воздействий ветра и забрызгиваемости волновыми гребнями, при этом борт заваливается внутрь корпуса для уменьшения бортовой качки под воздействием штормовых волн;
4. С ходового мостика должен обеспечиваться хороший обзор всей рабочей поверхности траловой палубы, что важно для обеспечения безопасности экипажа при маневрировании судна во время выполнения траловых операций;
5. Рефрижераторный трюм может быть устроен в носовой части судна с люковыми и грузовыми приспособлениями на палубе бака, обеспечивающими перегрузки рыбопродукции в открытом море.
Дополнительными условиями на проектирование рыболовного траулера может быть предусмотрено устройство носового бульба, в котором должно размещаться рыбопоисковое гидроакустическое оборудование. В варианте с носовым бульбом форма корпуса рыболовного траулера может быть образована «двойным клином» со скуловыми шпангоутами, обеспечивающими демпфирование килевой/вертикальной качки, и с полной транцевой кормой, обеспечивающей удержание кормой части корпуса траулера на одном уровне относительно взволнованной поверхности моря. Форма корпуса в виде «двойного клина» не является образцом хорошей штормовой мореходности. Однако, предположим, что стабилизировать такой корпус на волнении можно за счет уменьшения отношения ширины к осадке и придания подводным обводам такой формы, чтобы набегающий поток закручивался от бортов под днище не в районе скул, а ближе к миделю, гидродинамически совмещая таким образом носовую скулу и кормовую раковину.
Форма корпуса в виде «двойного клина» дает некоторые положительные мореходные качества траулеру, как то:
- возможность максимального расширения траловой палубы за счет демпфирующего качку развала бортов, в том числе в средней части корпуса;
- устройство максимально широкой кормовой палубы, на которой производятся наиболее трудоемкие и опасные для команды операции подъема/постановки трала;
- устройство «очень короткого» кормового подзора за счет повышенной полноты подводных ветвей шпангоутов в районе ахтерштевня («бульбовый ахтерштевень») позволит несколько снизить воздействие попутного волнения на объемную транцевую корму;
Рис. 47. Традиционный подход к построению формы корпуса рыболовного траулера с освобожденной для килевой качки носовой оконечностью и транцевой кормой, прижатой к поверхности воды потоком от движителей («двойной клин»).
- внутренний завал транца и надводной части кормовых шпангоутов позволит снизить динамическое и кренящее воздействие волнения при ходе рабочим курсом с тралом по волне;
- длинный ахтерштевень, достигающий крайней кормовой точки по длине корпуса, позволит несколько стабилизировать положение транцевого слипа на волнении, что важно для безопасности команды при выборке/поставке трала на свежем волнении;
- подрез бульба (подъем килевой линии в сторону носа) должен несколько стабилизировать рыскание траулера в условиях бортовой качки.
Однако такая форма корпуса обладает и существенными недостатками:
- у траулера довольно глубокая осадка - Т = 6.4 м, при ширине корпуса - В = 13.6 м (BKWL = 12 м), выбранная из условий для стабилизации корпуса типа «двойной клин» на волнении;
- бульбовый нос и развал надводных ветвей шпангоутов в носовой части корпуса существенно ограничат возможности судна по выбору курса относительно волнения, оставляя только один способ штормования - с активным ходом, курсом строго носом на волну;
- развал бортов в средней части корпуса может привести к завышенной качке корпуса на умеренном волнении на косых курсах относительно волнения и зыби;
- увеличение полноты подводных ветвей кормовых шпангоутов может приводить к отрыву потока в районе движителей, что скажется на эффективности работы винтов на больших скоростях хода без трала;
- при усилении шторма траулер не будет обеспечен необходимыми свойствами пассивного штормования в случае остановки движителей или рулевых устройств. Хотя при развитой носовой надстройке траулер с корпусом в форме «двойного клина» вполне сможет встать на штормовой курс по ветру и, подобно древним
судам русских поморов, удерживаться на этом курсе, управляясь глубоко посаженным плавниковым рулем или специальным штормовым парусом. Однако корпус и надстройки такого траулера должны быть обеспечены достаточной прочностью и герметичностью для удержания натиска штормовых волн.

Рис. 48. Рыболовный траулер в корпусе корабля XIX века.
|
На примере гипотетического проекта рыболовного траулера рассмотрен вариант проектных решений по форме корпуса и общекорабельной архитектуре, когда при оптимизационных решениях наибольший вес имели функциональные особенности траулера, что привело к существенному противоречию по обеспечению безопасности штормового плавания такого специализированного судна. Для закрытых морских акваторий этот траулер может быть неплох, но ничто не мешает обеспечить ему более высокий уровень штормовой мореходности без больших потерь функциональности.
| Проектные характеристики оптимизированного для штормового плавания траулера |
| Длина наибольшая / ватерлинии |
L |
103.5 / 100 м; |
| Ширина наибольшая |
B |
16 м; |
Ширина на уровне траловой палубы
- по верхней палубе средней надстройки |
ВТрал
ВDeck
|
14 м;
12 м; |
| Осадка |
Т |
6 м; |
Высота надводного борта до траловой палубы
- до верхней палубы средней надстройки |
НТрал
НDeck
|
3.5 м;
6 м; |
| Водоизмещение |
W |
4 523 м3; |
| Площадь смоченной поверхности |
S |
1 524 м2; |
| Коэффициент общей полноты |
d |
0.554. |
Рис. 49. Форма корпуса и элементы общего расположения траулера.
Штормовая оптимизация обводов корпуса для условий штормового плавания приводит к однообразным по форме проектным решениям. Снова использован принцип «утки с заостренным форштевнем» для носовой оконечности корпуса, при котором гребень встречной волны образует ослабленный дифферентующий момент за счет смещения сил всплытия ближе к средней части корпуса, а кормовой подзор обеспечивает удержание потока в районе движителей и стабилизирует корпус относительно среднего уровня в возмущенном, но стабилизированном потоке в кормовой части траулера.
Слепое следование формальным требованиям по удобству размещения технологического оборудования на палубах траулера, а также гидроакустической аппаратуры именно в носовом бульбе может не удовлетворять хорошей морской практике. В то же время уделение большего внимания пассивности корпуса к силовому воздействию морского волнения может привести к согласованию множества других противоречивых проектно-технических решений и улучшению мореходных и эксплуатационных качеств траулера в целом:
- стабилизация килевой качки улучшит работу гидроакустической аппаратуры, которая может быть установлена в выдвижных гондолах под днищем в средней части корпуса;
- завал бортов в средней части корпуса уменьшит бортовую качку, что создаст более комфортные условия работы экипажа и обеспечит безопасность траловой команды при сложных операциях с орудиями лова;
- уменьшение ширины транцевой кормы снизит силовое воздействие при захвате корпуса попутной волной, что важно для безопасности траловой команды и сохранности орудий лова и палубного оборудования при операциях постановки – подъема трала.

Рис. 50. Рыболовный траулер в условиях жестокого волнения.
Рекогносцировочные испытания самоходной радиоуправляемой модели не выявили опасных режимов штормового плавания. Несмотря на малую мощность двигателей траулер сохранял способность двигаться и маневрировать на любых курсах относительно волнения.
Для минимизации силового воздействия волнения на широкую транцевую корму траулера необходимо изменить схему крепления траловых досок, рабочее положение которых может быть перенесено из-за транца в специальные «уступы» на бортах в кормовой части корпуса. Такое размещение траловых досок обеспечит доступ и обслуживание их обычными палубными грузоподъемными механизмами и надежное крепление «по штормовому» даже без перегрузки на палубу. А сами бортовые уступы, при усилении шторма, будут играть роль «надводного бортового киля» (по определению В.П. Костенко), стабилизируя корпус в условиях захвата кормы попутной штормовой волной.
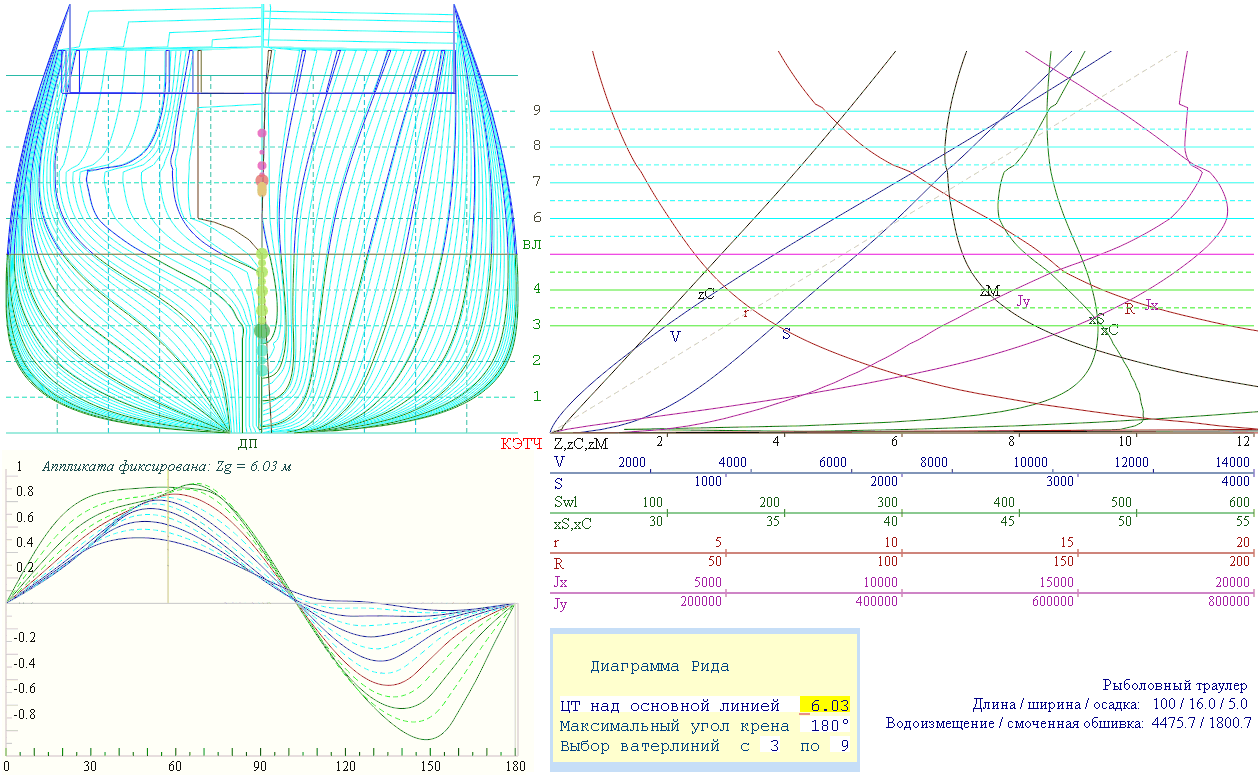
Рис. 51. Кривые элементов теоретического чертежа (справа) и (слева внизу) плечи остойчивости формы корпуса рыболовного траулера, оптимизированного для работы на интенсивном морском волнении и безопасного плавания в штормовых условиях. Кривая остойчивости для конструктивной ватерлинии выделена красным цветом, на погружение корпуса в условиях вертикальной качки - синим, на всплытие - зеленым. Метацентрическая высота выбрана в расчете h=1 м для фиксированной аппликаты центра тяжести Zg=6,03 м. Корпус обладает S-образной диаграммой остойчивости, что крайне важно для безопасности судна при подъеме на борт тяжелого трала с рыбой, при выполнении грузовых операций в порту и в открытом море.
На кривых элементах теоретического чертежа рыболовного траулера показано, что при погружении корпуса в штормовую волну, интенсивность как кренящих, так и дифферентующих моментов не будет усиливаться за счет возрастающих моментов инерции и площади погруженной ватерлинии, что является определяющим требованием по минимизации всех видов качки при работе с тралом в условиях интенсивного морского волнения. Аппликата метацентра, абсциссы центров величины и площади ватерлинии практически не изменяют своих величин на всех рабочих осадках, в том числе динамически изменяющихся в результате вертикальной качки на морской зыби, что также должно благоприятно сказываться на поддержании уровня остойчивости и ослаблении рыскания, позволяя стабилизировать качку активными успокоителями и удерживать судно в заданном режиме работы с тралом с помощью автоматического управления рулем, движителями и ваерными лебедками.
Округлая форма корпуса приводит к тому, что диаграммы остойчивости сглаживаются и приобретают форму правильной синусоиды (рис.51). Кроме того, что это положительное качество формы корпуса в целом, поведение такого судна на волнении также будет более прогнозируемым и позволит эффективно применять автоматическое управление движением и стабилизацию всех видов качки с использованием адаптивных математических моделей, основанных на идентификации параметров динамики корпуса траулера на волнении.
 История штормовой мореходности (от древности до наших дней)
История штормовой мореходности (от древности до наших дней)
§ 1. История кораблестроения как поиск непротиворечивого диалога с океаном
§ 2. Условия штормового мореходства и морская инфраструктура
§ 3. Проектные особенности корабля повышенной штормовой мореходности
§ 4. Проработка перспективных проектов кораблей повышенной мореходности
Морское дело и научно-техническое творчество юношества
Краткий толковый словарь морских и кораблестроительных терминов
Аннотированный список использованной литературы
Содержание